



















Note
Added Damping is not applied if the mA output is fixed (for example, during loop testing) or if the mA
output is reporting a fault. Added Damping is applied while sensor simulation is active.
Procedure
Set Added Damping to the desired value.
The default value is 0.0 seconds.
When you specify a value for Added Damping, the transmitter automatically rounds the value
down to the nearest valid value.
Note
Added Damping values are affected by the setting of Update Rate and 100 Hz Variable.
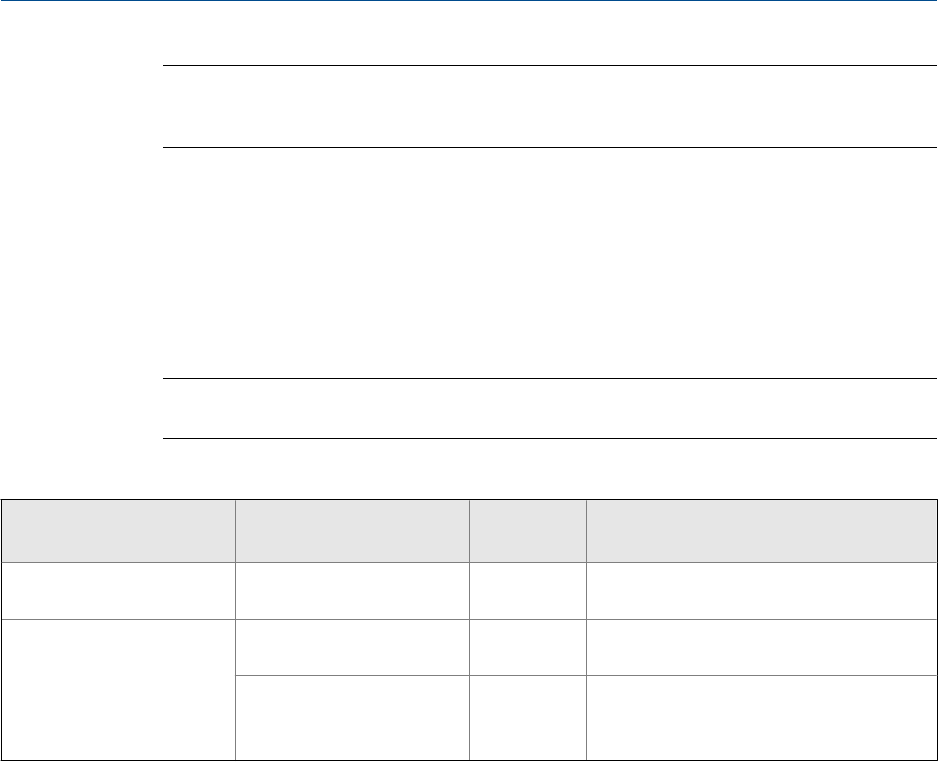
Valid values for Added DampingTable 6-3:
Setting of Update Rate Process variable
Update rate
in effect Valid values for Added Damping
Normal N/A 20 Hz 0.0, 0.1, 0.3, 0.75, 1.6, 3.3, 6.5, 13.5, 27.5, 55,
110, 220, 440
Special 100 Hz variable (if assigned
to the mA output)
100 Hz 0.0, 0.04, 0.12, 0.30, 0.64, 1.32, 2.6, 5.4, 11, 22,
44, 88, 176, 350
100 Hz variable (if not as-
signed to the mA output)
All other process variables
6.25 Hz 0.0, 0.32, 0.96, 2.40, 5.12, 10.56, 20.8, 43.2, 88,
176, 352
Interaction between Added Damping and process variable
damping
When mA Output Process Variable is set to a flow variable, density, or temperature, Added
Damping interacts with Flow Damping, Density Damping, or Temperature Damping. If multiple
damping parameters are applicable, the effect of damping the process variable is
calculated first, and the added damping calculation is applied to the result of that
calculation.
Example: Damping interaction
Configuration:
• Flow Damping = 1 second
• mA Output Process Variable = Mass Flow Rate
• Added Damping = 2 seconds
Result: A change in the mass flow rate will be reflected in the mA output over a time period
that is greater than 3 seconds. The exact time period is calculated by the transmitter
according to internal algorithms which are not configurable.
Integrate the meter with the control system
86 Micro Motion
®
Model 1700 Transmitters with Analog Outputs