



















4 - 11
4. OPERATION
(b) Continuous move command (MOVA MOVIA)
POINT
"MOV" cannot be used with "MOVIA", and "MOVI" cannot be used with
"MOVA".
The "MOVA" command is a continuous move command for the "MOV" command. After execution of
the movement by the "MOV" command, the movement of the "MOVA" command can be executed
continuously without a stop.
The speed changing point of the "MOVA" command is the deceleration starting position of the
operation performed by the preceding "MOV" and "MOVA" commands.
The acceleration/deceleration time constant of the "MOVA" command is the value at execution of
the preceding "MOV" command.
The "MOVIA" command is a continuous move command for the "MOVI" command. After execution
of the movement by the "MOVI" command, the movement of the "MOVIA" command can be
executed continuously without a stop.
The speed changing point of the "MOVIA" command is the deceleration starting position of the
operation performed by the preceding "MOVI" and "MOVIA" commands.
The acceleration/deceleration time constant of the "MOVIA" command is the value at execution of
the preceding "MOVI" command.
Command Name Setting Unit Description
MOV
Absolute move
command
MOV
(Set value)
10
STM
m Absolute move command
MOVA
Absolute
continuous
move
command
MOVA
(Set value)
10
STM
m Absolute continuous move command
MOVI
Incremental
move
command
MOVI
(Set value)
10
STM
m Incremental move command
MOVIA
Incremental
continuous
move
command
MOVIA
(Set value)
10
STM
m Incremental continuous move command
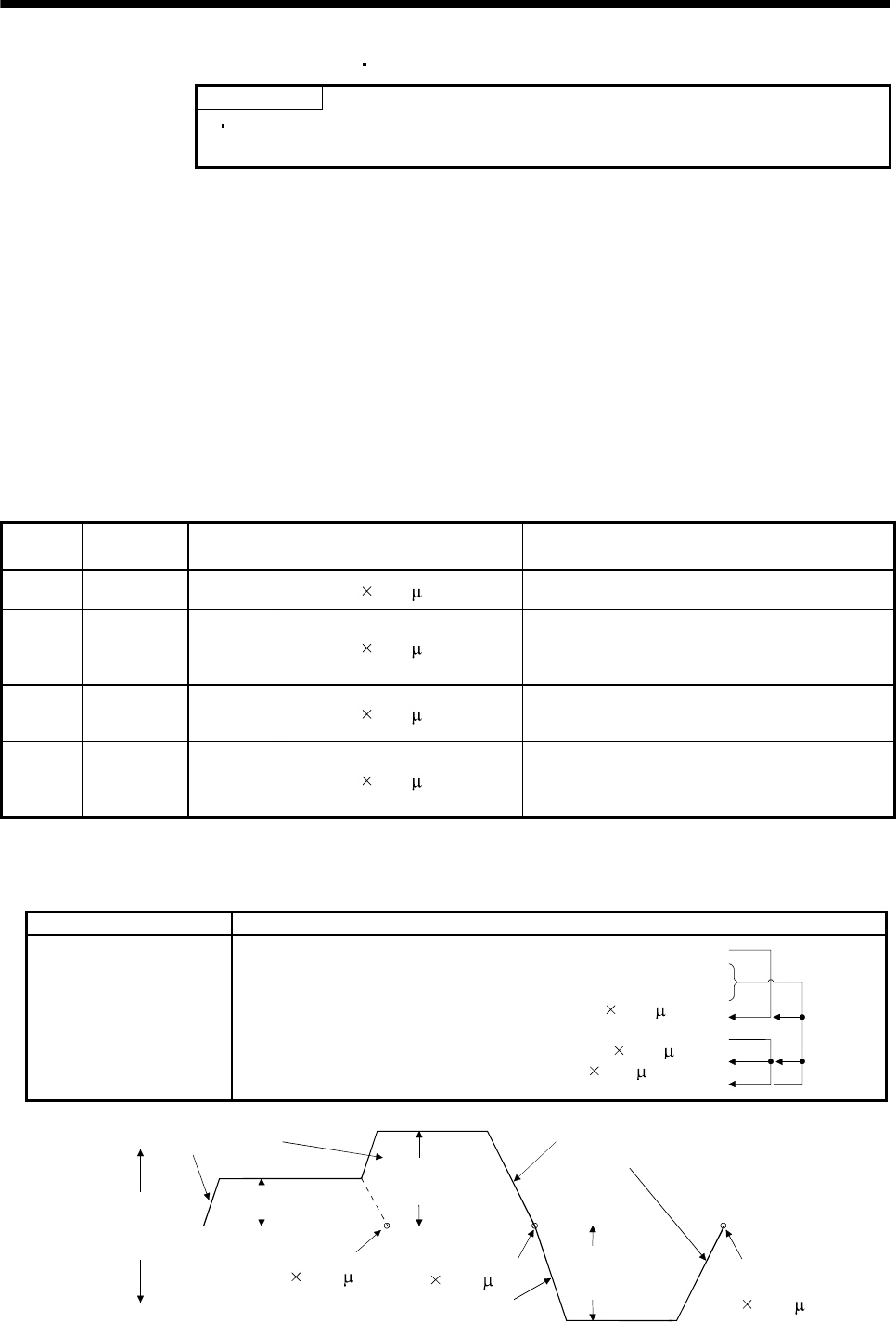
1) Program example 1
Use of an S-pattern time constant allows sudden operation to be eased at the time of acceleration
and deceleration.
Program Description
SPN (500)
STA (200)
STB (300)
MOV (500)
SPN (1000)
MOVA (1000)
MOVA (0)
STOP
Speed (Motor speed) 500 [r/min] a)
Acceleration time constant 200 [ms] b)
Deceleration time constant 300 [ms] c)
Move command 500 [
10
STM
m] d)
Speed (Motor speed) 1000 [r/min] e)
Continuous move command 1000 [
10
STM
m] f)
Continuous move command 0 [
10
StM
m] g)
Program
end
0r/min
Servo motor
speed
Reverse
rotation
a) Speed(Motor speed)
(500r/min)
d) Absolute move
command
(500 10
STM
m)
b) Acceleration time
constant (200ms)
c) Deceleration time
constant (300ms)
b) Acceleration time
constant (200ms)
f) Absolute continuous
move command
(1000 10
STM
m)
Forward
rotation
g) Absolute continuou
s
move command
(0 10
STM
m)
e) Speed
(Motor speed)
(1000r/min)
e) Speed
(Motor speed)
(1000r/min)