


















3 - 7
3. SIGNALS AND WIRING
Device name
Devices
symbol
Connector
pin No.
Functions/Applications
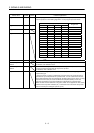
To start operation, turn LSP/LSN on. Turn it off to bring the motor to a sudden
stop and make it servo-locked.
Set "
1" in parameter No. 22 to make a slow stop.
(Refer to Section 5.2.5.)
(Note) Input signals Operation
LSP LSN
CCW
direction
CW
direction
Forward rotation
stroke end
LSP CN1B-16
11
01
10
00
Reverse rotation stroke
end
LSN CN1B-17
Note. 0: OFF
1: ON
Program input1 PI1 CN1B-8 Turn PI1 on to resume the step stopped by the SYNC (1) command in the program.
Program input2 PI2 CN1B-9 Turn PI2 on to resume the step stopped by the SYNC (2) command in the program.
Program input3 PI3 Turn PI3 on to resume the step stopped by the SYNC (3) command in the program.
Forward rotation start ST1 CN1B-7 1. In program operation mode
When ST1 is turned on, the operation of the program selected with DI0 to DI3 is
executed.
2. Jog operation in manual operation mode
While ST1 is kept on, the servo motor rotates in the forward rotation direction.
Forward rotation indicates an address increasing direction.
Reverse rotation start ST2 While ST2 is kept on in jog operation of the manual operation mode, the servo
motor rotates in the reverse rotation direction. Reverse rotation indicates an
address decreasing direction.
ST2 is invalid in any other operation mode.
Automatic/manual
selection
MD0 Turn MD0 on to select the program operation mode, or turn it off to select the
manual operation mode.
In the factory setting state, Forced stop (EMG) is preset to turn on automatically.
(Refer to Section 6.6 (2) (c).)
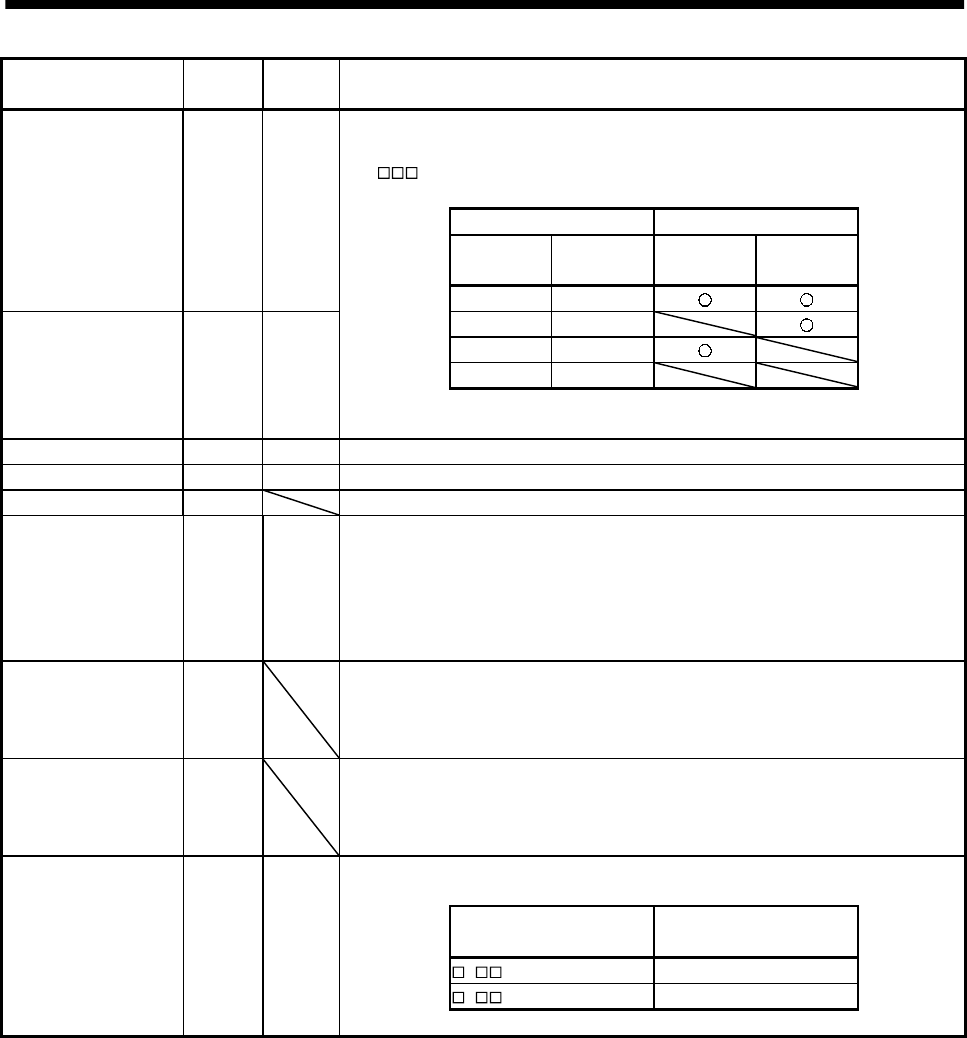
Turn DOG on to bring, the proximity dog signal is detected. The polarity of dog
detection input can be changed with the parameter.
Parameter No.8
Polarity of proximity dog
detection input
0 (initial value) OFF
1 ON
Proximity dog DOG CN1A-8