



















4 - 41
4. OPERATION
4.4.9 Dog cradle type home position return
The position where the first Z-phase signal is issued after detection of the proximity dog front end can be
defined as a home position.
(1) Signals, parameters
Set the input signals and parameters as indicated below.
Item Device/Parameter used Description
Manual home position return mode
selection
Automatic/manual selection (MD0) MD0 is switched on.
Dog cradle type home position
return
Parameter No.8
7: Select the dog cradle type.
Home position return direction Parameter No.8
Refer to Section 4.4.1 (2) in this section and
select the home position return direction.
Dog input polarity Parameter No.8
Refer to Section 4.4.1 (2) in this section and
select the dog input polarity.
Home position return speed Parameter No.9 Set the speed till the dog is detected.
Creep speed Parameter No.10 Set the speed after the dog is detected.
Home position shift distance Parameter No.11
Set when the home position is moved from the Z-
phase signal position.
Home position return
acceleration/deceleration time
constants
Parameter No.41
Use the acceleration/deceleration time constants
set in parameter No. 41.
Home position return position data Parameter No.42
Used to set the current position on completion of
home position return.
Program
Select the program including the
"ZRT" command that executes a
home position return.
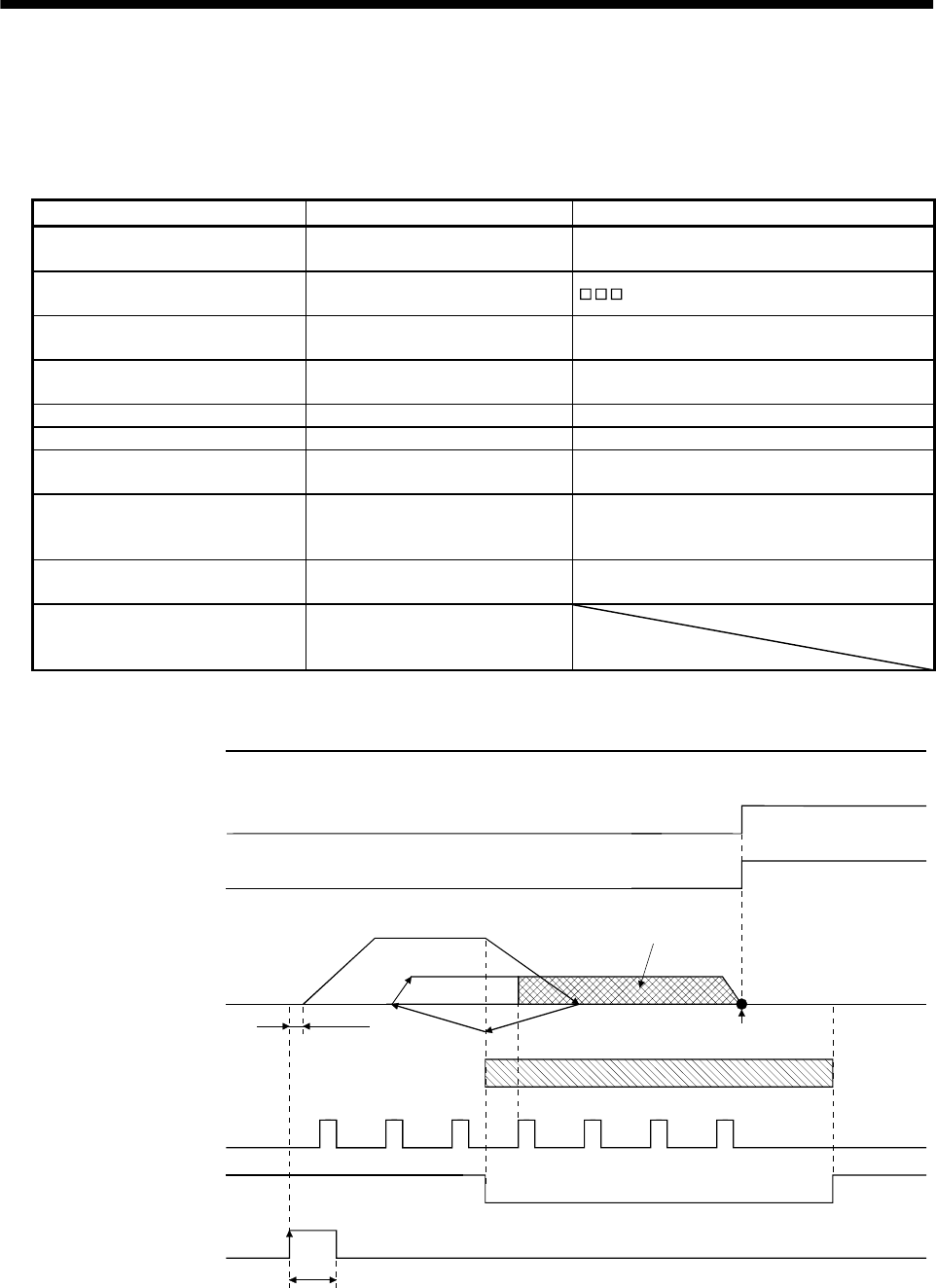
(2) Timing chart
The following shows the timing chart that starts after selection of the program including the "ZRT"
command.
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Automatic/manual
selection (MD0)
Movement complete (PED)
Home position return
completion (ZP)
Z-phase
Proximity dog (DOG)
Forward rotation
start (ST1)
Creep speed
Home position return speed
Home position shift distance
Proximity dog
5ms or more
3ms or less
Home position address
Parameter No. 42
Servo motor speed
Forward
rotation
0r/min
Reverse
rotation
The address on completion of home position return is the value automatically set in parameter No.42
(home position return position data).