



















4 - 26
4. OPERATION
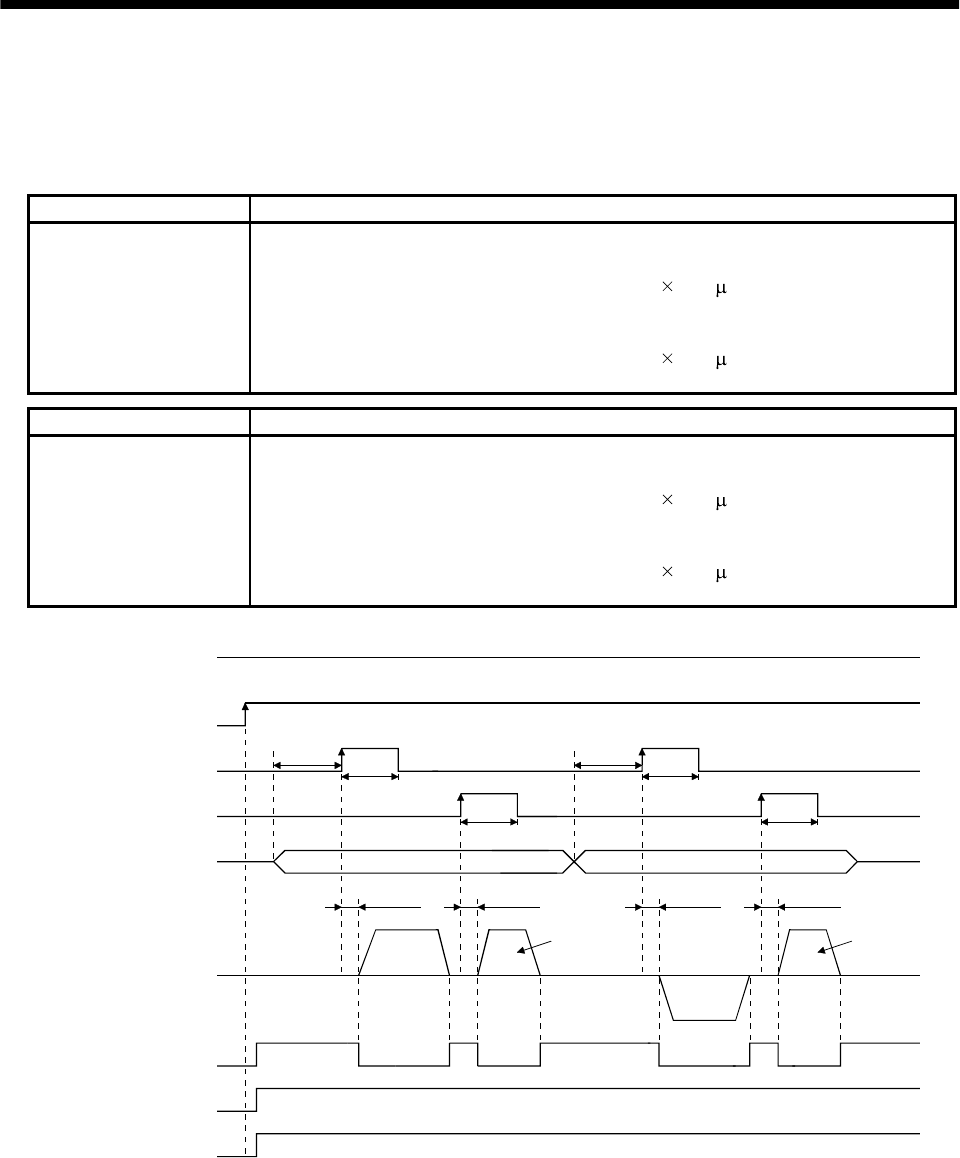
4.2.4 Program operation timing chart
(1) Operation conditions
The timing chart shown below assumes that the following program is executed in the absolute value
command system where a home position return is completed.
Program No.1 Description
SPN (1000)
STC (100)
MOV (5000)
SYNC (1)
STC (50)
MOV (7500)
STOP
Speed (Motor speed) 1000 [r/min]
Acceleration time constant 100 [ms]
Absolute move command 5000 [
10
STM
m] Move command 1
Step is suspended until Program input (PI1) turns ON.
Acceleration/deceleration time constant 50 [ms]
Absolute move command 7500 [
10
STM
m] Move command 2
Program end
Program No.2 Description
SPN (1000)
STC (100)
MOV (2500)
SYNC (1)
STC (50)
MOV (5000)
STOP
Speed (Motor speed) 1000 [r/min]
Acceleration time constant 100 [ms]
Absolute move command 2500 [
10
STM
m] Move command 3
Step is suspended until Program input (PI1) turns ON.
Acceleration/deceleration time constant 50 [ms]
Absolute move command 5000 [
10
STM
m] Move command 4
Program end
Forward rotation
0 r/min
Reverse rotation
21
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Automatic/manual
selection (MDO)
Servo-on (SON)
Forward rotation
start (ST1)
Program No.
Movement
complete
(PED)
Ready (RD)
Trouble (ALM)
(Note)
3ms or more
5ms or more
3ms or less
Move
command
1
Move
command
2
Move
command
3
Move
command
4
Note: External input signal detection delays by the input filter setting time of parameter No. 2. Also, make up a sequence
that will change the program selection earlier by the time that takes into account the output signal sequence from
the controller and the variation of a signal change due to the hardware.
3ms or less 3ms or less 3ms or less
5ms or more
5ms or more
5ms or more
(Note)
3ms or more
Program input1
(PI1)
Servo motor
speed