


















3 - 14
3. SIGNALS AND WIRING
3.4.2 Movement complete
POINT
If servo-on occurs after a stop made by servo-off, alarm occurrence or
Forced stop (EMG) ON during automatic operation, Movement complete
(PED), turn on. To make a start again, confirm the program No. being
specified, and turn on Forward rotation start (ST1).
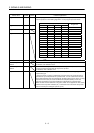
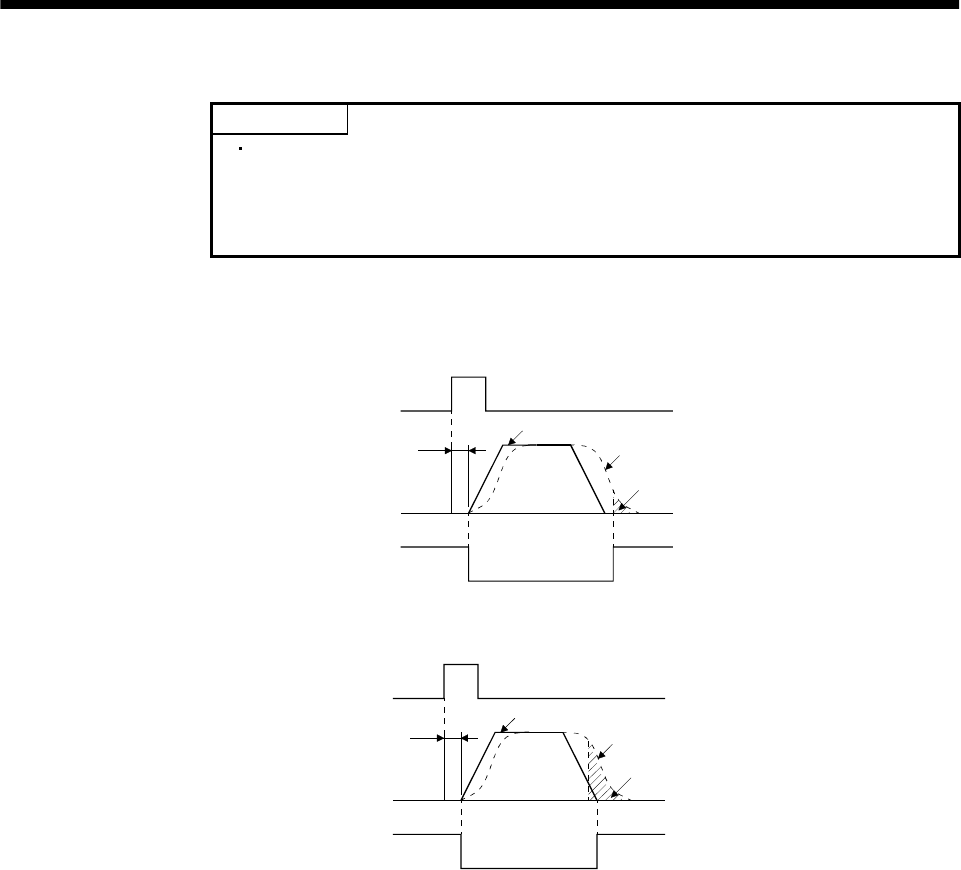
The following timing charts show the output timing relationships between the position command
generated in the servo amplifier and the Movement complete (PED). This timing can be changed using
parameter No. 6 (Movement complete output range). Turn PED on to bring in the servo-on status.
Forward rotation start (ST1)
or reverse rotation start (ST2)
Position command and
servo motor speed
3ms or less
Movement complete range
Servo motor speed
Position command
OFF
ON
OFF
ON
Movement complete (PED)
When parameter No. 6 is small
Forward rotation start (ST1)
or reverse rotation start (ST2)
Position command and
servo motor speed
Movement complete (PED)
3ms or less
Movement complete range
Servo motor speed
Position command
OFF
ON
OFF
ON
When parameter No. 6 is large