


















5 - 8
5. PARAMETERS
Class No. Symbol Name and Function
Initial
value
Unit
Setting
range
4 CMX Electronic gear numerator
Set the value of electronic gear numerator. Setting "0" automatically sets the
resolution of the servo motor connected. (Refer to Section 5.2.1)
10 to
65535
5 CDV Electronic gear denominator
Set the value of electronic gear denominator. (Refer to Section 5.2.1)
11 to
65535
6 PED Movement complete output range
Used to set the droop pulse range when the movement complete output range
(PED) is output.
100
m0 to
10000
7 PG1 Position loop gain 1
Used to set the gain of position loop 1. (Refer to Chapter 8)
Increase the gain to improve tracking performance in response to the position
command.
36 rad/s 4 to 1000
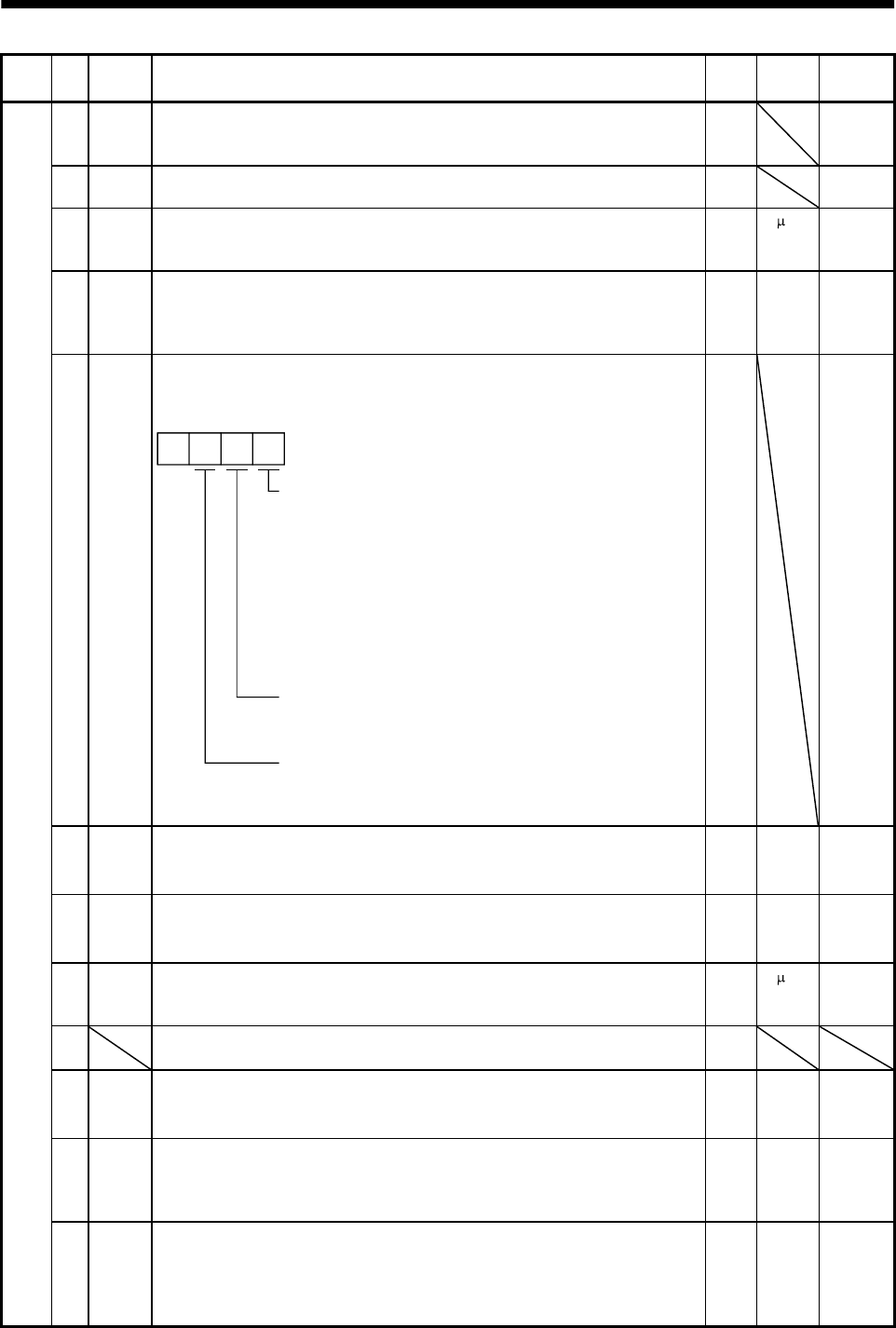
8 *ZTY Home position return type
Used to set the home position return system, home position return direction and
proximity dog input polarity.
Home position return system
0: Dog type
1: Count type
2: Data setting type
3: Stopper type
4: Home position ignorance
(Servo-on position as home position)
5: Dog type rear end reference
6: Count type front end reference
7: Dog cradle type
Home position return direction
0: Address increment direction
1: Address decrement direction
Proximity dog input polarity
0: Dog is detected when DOG is turned off.
1: Dog is detected when DOG is turned on.
0
0010 Refer to
Name
and
function
column.
9ZRF
Home position return speed
Used to set the servo motor speed for home position return.
(Refer to Section 4.4)
500 r/min
0 to
permissible
speed
10 CRF
Creep speed
Used to set the creep speed after proximity dog detection.
(Refer to Section 4.4)
10 r/min
0 to
permissible
speed
11 ZST
Home position shift distance
Used to set the shift distance starting at the Z-phase pulse detection position
inside the encoder.
0
m 0 to 65535
12 For manufacturer setting
Don’t change this value by any means.
0
13 JOG
Jog speed
Used to set the jog speed command.
100 r/min
0 to
permissible
speed
14 *STC
S-pattern acceleration/deceleration time constant
Set when inserting S-pattern time constant into the acceleration/deceleration
time constant of the point table. (Refer to Section 5.2.3)
This time constant is invalid for home position return.
0ms0 to 100
Basic parameters
15 *SNO
RS-422 station number setting
Used to specify the station number for RS-422 multidrop communication.
(Refer to Section 4.6.3)
Always set one station to one axis of servo amplifier. If one station number is set
to two or more stations, normal communication cannot be made.
0 Station 0 to 31