



















4 - 44
4. OPERATION
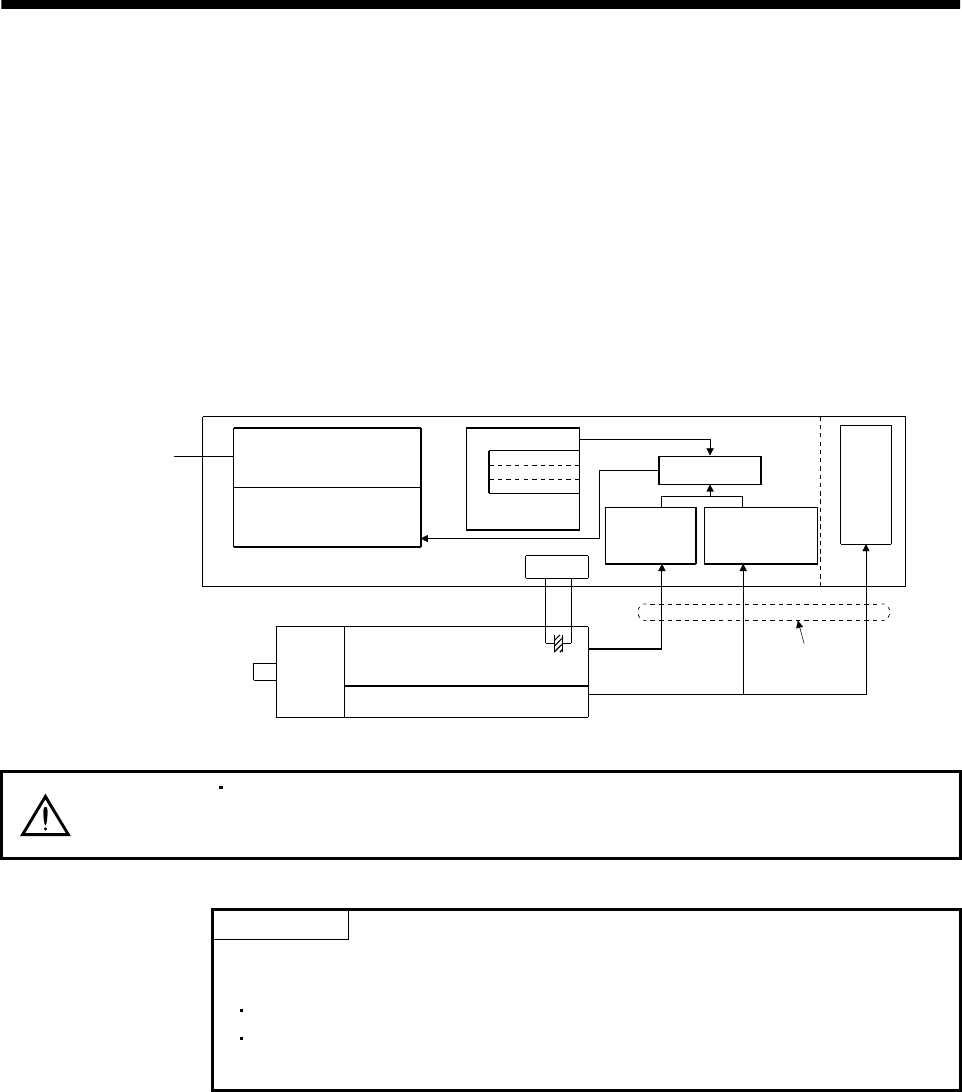
(4) Outline of absolute position detection data communication
For normal operation, as shown below, the encoder consists of a detector designed to detect a position
within one revolution and a cumulative revolution counter designed to detect the number of
revolutions.
The absolute position detection system always detects the absolute position of the machine and keeps
it battery-backed, independently of whether the general-purpose programming controller power is on
or off. Therefore, once the home position is defined at the time of machine installation, home position
return is not needed when power is switched on thereafter.
If a power failure or a fault occurs, restoration is easy.
Also, the absolute position data, which is battery-backed by the super capacitor in the encoder, can be
retained within the specified period (cumulative revolution counter value retaining time) if the cable is
unplugged or broken.
LSO
1XO
MR-BAT
Servo amplifier
Program No. selection
(DI0 to DI3), etc.
I/O circuit
Position data, speed data
(current position read)
Home position return
data
EEP-ROM memory
Backup at
power off
Battery
Current position
LS
Speed detection
1X
Detection of position
within one revolution
Servo motor
Within one-revolution counter
High-speed serial
communication
Speed control
Position control
1 pulse/rev. Cumulative
revolution counter
Super capacitor
(5) Battery installation procedure
WARNING
Before starting battery installation procedure, make sure that the charge lamp is off
more than 10 minutes after power-off. Then, confirm that the voltage is safe in the
tester or the like. Otherwise, you may get an electric shock.
POINT
The internal circuits of the servo amplifier may be damaged by static electricity.
Always take the following precautions:
Ground human body and work bench.
Do not touch the conductive areas, such as connector pins and electrical
parts, directly by hand.