

















13 - 4
13. CHARACTERISTICS
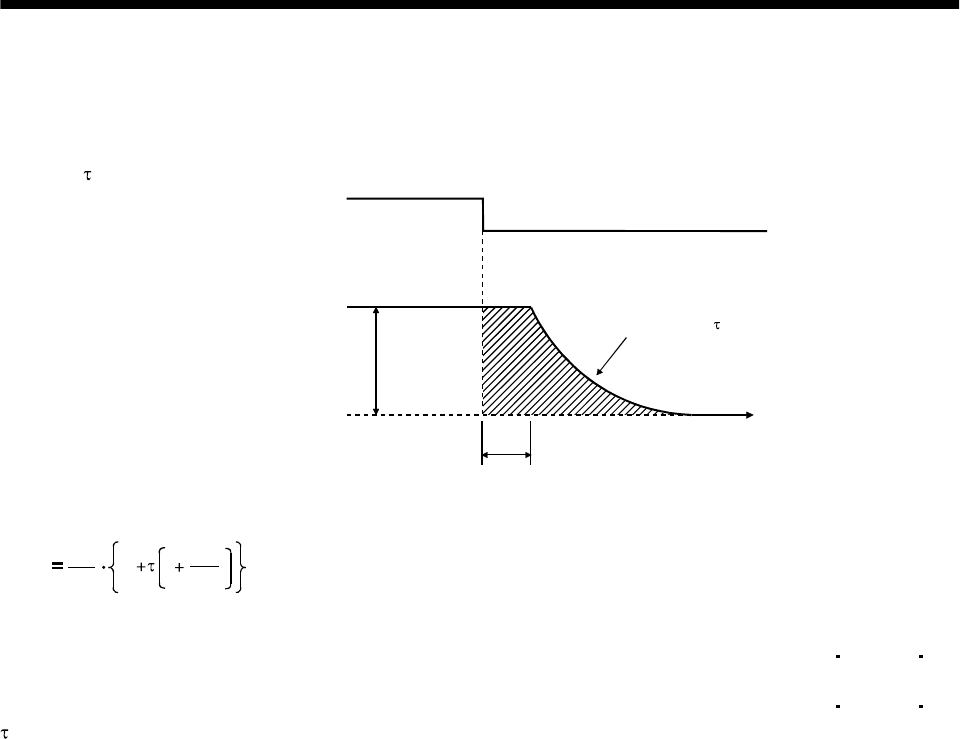
13.3 Dynamic brake characteristics
Fig. 13.3 shows the pattern in which the servo motor comes to a stop when the dynamic brake is operated.
Use Equation 13.2 to calculate an approximate coasting distance to a stop. The dynamic brake time
constant
varies with the servo motor and machine operation speeds. (Refer to Fig. 13.4)
V
0
Time constant
Forced stop (EMG)
OFF
ON
Machine speed
t
e
Time
Fig. 13.3 Dynamic brake operation diagram
L
max
60
V
0
J
L
J
M
t
e
1
....................................................................................................................... (13.2)
L
max
: Maximum coasting distance .................................................................................................[mm][in]
V
0
: Machine rapid feedrate ......................................................................................... [mm/min][in/min]
J
M
: Servo motor inertial moment................................................................................. [kg cm
2
][oz in
2
]
J
L
: Load inertia moment converted into equivalent value on servo motor shaft
.................................................................................................................................[kg
cm
2
][oz in
2
]
: Brake time constant........................................................................................................................ [s]
t
e
: Delay time of control section...........................................................................................................[s]
(There is internal relay delay time of about 30ms.)