



















4 - 10
4. OPERATION
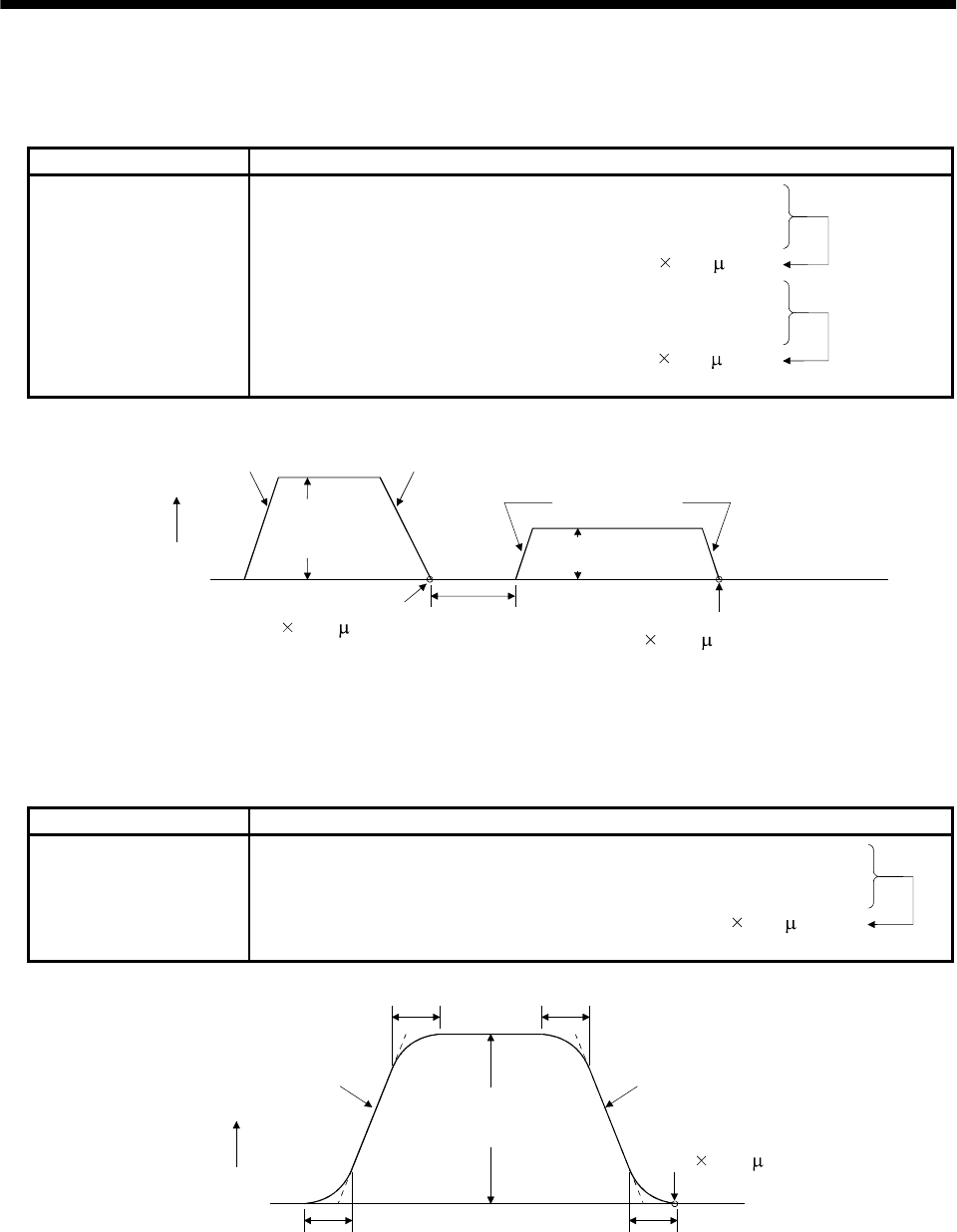
2) Program example 2
When operation is to be performed in two patterns that have different servo motor speeds,
acceleration time constants, deceleration time constants and move commands.
Program Description
SPN (1000)
STA (200)
STB (300)
MOV (1000)
TIM (10)
SPN (500)
STC (200)
MOV (1500)
STOP
Speed (Motor speed) 1000 [r/min] a)
Acceleration time constant 200 [ms] b)
Deceleration time constant 300 [ms] c)
Absolute move command 1000 [
10
STM
m] d)
Dwell command time 100 [ms] e)
Speed (Motor Speed) 500 [r/min] f)
Acceleration/deceleration time constant 200 [ms] g)
Absolute move command 1500 [
10
STM
m] h)
Program
end
0r/min
Servo motor
speed
Forward
rotation
d) Absolute move command
(1000 10
STM
m)
b) Acceleration time
constant (200ms)
c) Deceleration time
constant (300ms)
g) Acceleration/
deceleration time
constant
(200ms)
h) Absolute move command
(1500 10
STM
m)
e) Dwell command
time (100ms)
f) Speed (Motor speed)
(500r/min)
a) Speed
(Motor speed)
(1000r/min)
3) Program example 3
Use of an S-pattern acceleration/deceleration time constant allows sudden operation to be eased
at the time of acceleration and deceleration. When the "STD" command is used, parameter No.
14 (S-pattern acceleration/deceleration time constant) is ignored.
Program Description
SPN (1000)
STC (100)
STD (10)
MOV (2000)
STOP
Speed (Motor speed) 1000 [r/min] a)
Acceleration/deceleration time constant 1000 [ms] b)
S-pattern acceleration/deceleration time constant 10 [ms] c)
Absolute move command 2000 [
10
STM
m] d)
Program
end
0r/min
Servo motor
speed
Forward
rotation
c) S-pattern acceleration/
deceleration time
constant (10ms)
a) Speed
(Motor speed)
(1000r/min)
c)
c) c)
d) Absolute move command
(2000 10
STM
m)
b) Acceleration/deceleration
time constant
(1000ms)
b) Acceleration/deceleration
time constant
(1000ms)