


















4 - 50
4. OPERATION
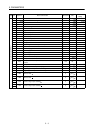
(3) Program example
Program Description
SPN (1000)
STA (200)
STB (300)
MOV (1000)
TIM (10)
SPN (500)
STA (200)
STB (300)
MOVI (1000)
SPN (1000)
MOVIA (1000)
STOP
Speed (Motor speed) 1000 [r/min] a)
Acceleration time constant 200 [ms] b)
Deceleration time constant 300 [ms] c)
Incremental move command 1000 [
10
STM
m] d)
Dwell command time 100 [ms] e)
Speed (Motor speed) 500 [r/min] f)
Acceleration time constant 200 [ms] g)
Deceleration time constant 300 [ms] h)
Incremental move command 1000 [
10
STM
m] i)
Speed (Motor speed) 1000 [r/min] j)
Incremental continuous move command 1000 [
10
STM
m] k)
Program end
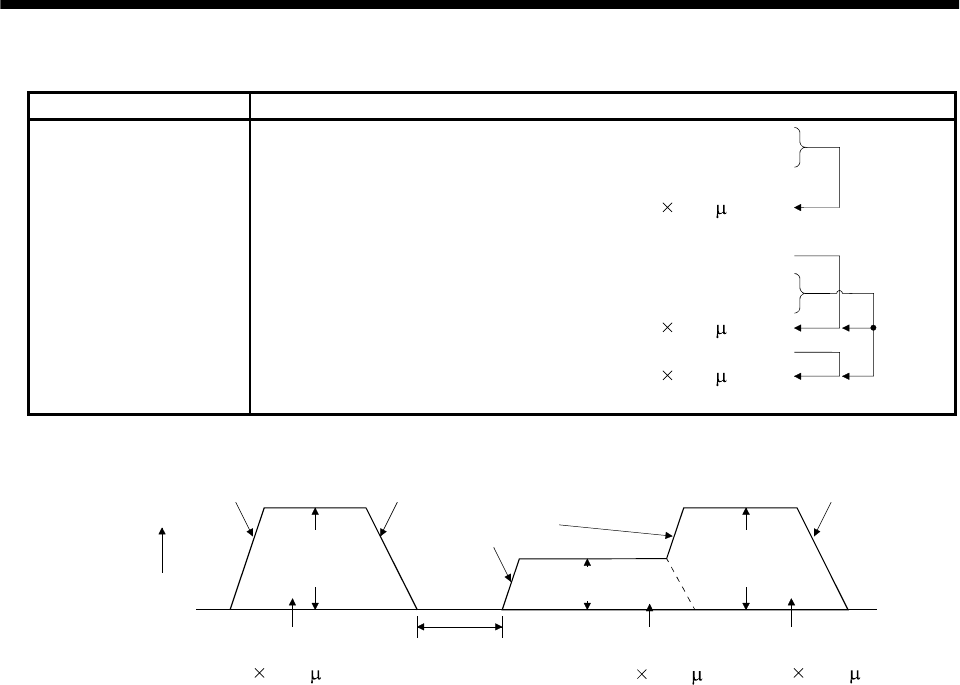
0r/min
Forward
rotation
Servo motor
speed
e) Dwell command time
(100ms)
g) Acceleration time
constant
(200ms)
c) Deceleration time
constant
(300ms)
a) Speed
(Motor speed)
(1000r/min)
b) Acceleration time
constant
(200ms)
j) Speed
(Motor speed)
(1000r/min)
h) Deceleration time
constant
(300ms)
d) Incremental
move command
(1000 10
STM
m)
i) Incremental
move command
(500 10
STM
m)
k) Incremental
move command
(1000 10
STM
m)
f) Speed(Motor speed)
(500r/min)