



















Attack Time — Adjusts the time to duck the targets once the threshold is exceeded.
The range is 0 to 3000 milliseconds in 1 millisecond increments. Default is 1millisecond.
Hold Time — Determines the time, in milliseconds, after a ducking source signal drops
below the threshold before ducking ceases.
The range is 0 to 10000milliseconds in 1 millisecond increments. Default is
1000milliseconds (1second).
Release — Determines how long, in milliseconds, after the ducking source level is below
the threshold and the hold time is met, the ducking targets take to restore signal levels.
The range is 10 to 10000 milliseconds in 1 millisecond increments. Default is
1000milliseconds (1second).
priority
In some cases, multiple levels of ducking may be required enabling an input source to
take precedence over all but one other input.
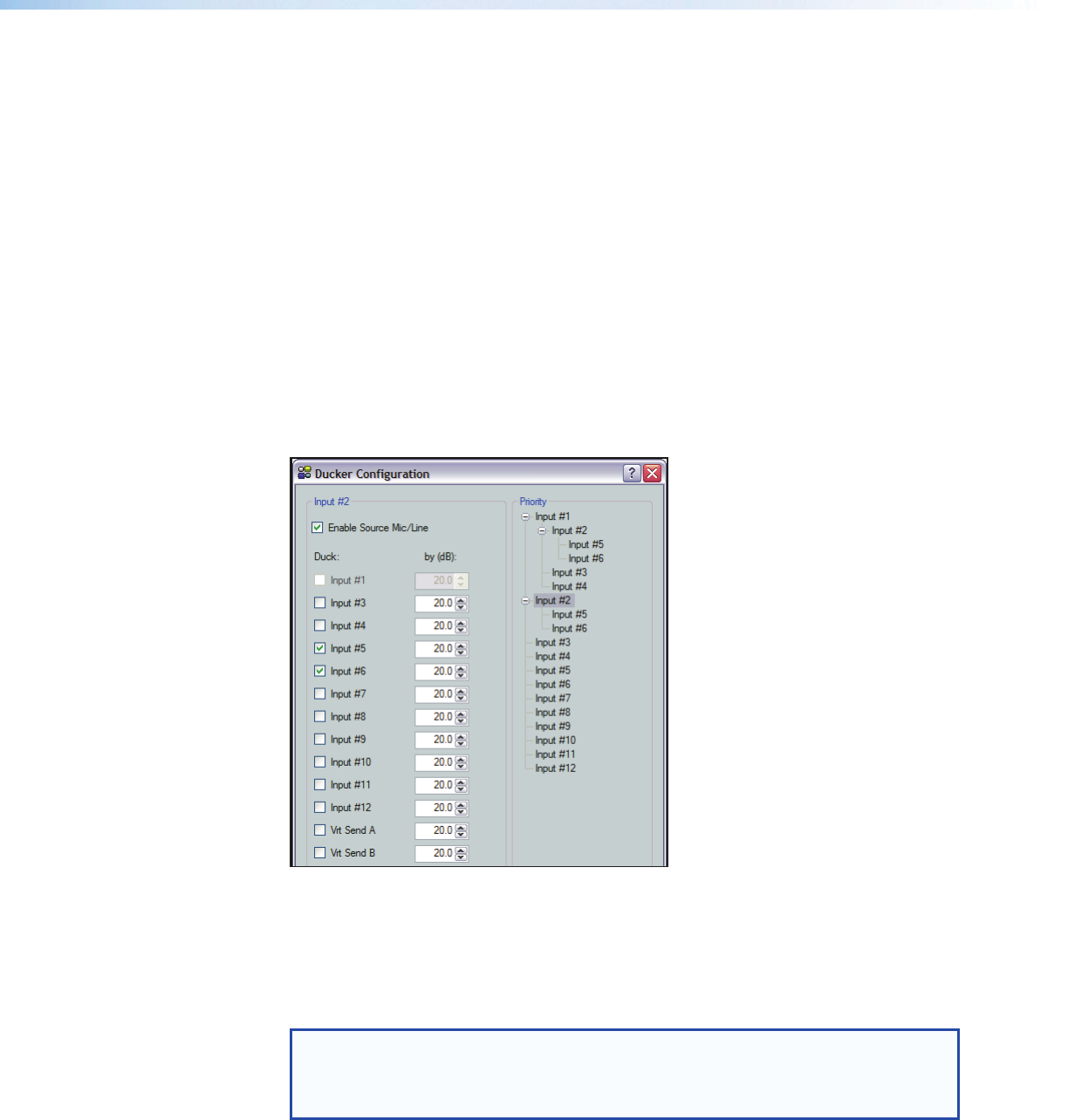
In this example, Inputs 2-6 are set to duck when Input #1 has a signal above the ducking
threshold. Input#2 is set to duck inputs 5-6. Since Input #1 has previously been set to
duck Input #2, Input #1 is disabled (grayed out) to prevent contradictory priorities.
Figure 34. Ducker Configuration, Input Priority
Notice the priority tree on the right. The inputs are arranged by their priority status. Input
#1 has all other ducked inputs under it, therefore if a signal is detected, it will trigger Inputs
2-6 to duck. If Input #2 detects a signal and there is no signal on Input #1, Input#2 will
trigger inputs 5-6 to duck. However if the Input#1 signal exceeds the threshold, it will
then duck all inputs including Input #2.
NOTE: Ducking attenuation is not additive. When an input target is ducked,
regardless of how far down the priority line it is, the maximum attenuation is that
set for the individual input and virtual send in the “by:” column near the center of
the dialog box.
See “Ducker Tutorials” on page 55 for additional information.
DMP128 • Software Control 54