



















8.13.2 SSI output (X5)
The SSI interface (synchronous serial absolute-encoder simulation) is part of the delivered pack
-
age. Select the encoder function SSI (screen page “Encoder”). In the servo amplifier, the position of
the motor shaft is calculated from the cyclically absolute signals from the resolver or encoder. This
information is used to create a position output in a format that is compatible with the standard
SSI-absolute-encoder format. 24 bits are transmitted.
SINGLE TURN selected: The upper 12 bits are fixed to ZERO, the lower 12 bits contain the posi
-
tion information. For 2-pole resolvers, the position value refers to the position within one turn of the
motor, for 4-pole resolvers it is within half a turn, and for 6-pole resolvers it is within a third of a turn.
Exception
: If an encoder with a commutation track is used as the feedback unit, then the upper 12
bits are set to 1 (data invalid!) until a homing run is performed.
MULTI TURN selected: The upper 12 bits contain the number of motor turns, the lower 12 bits con
-
tain the position information.
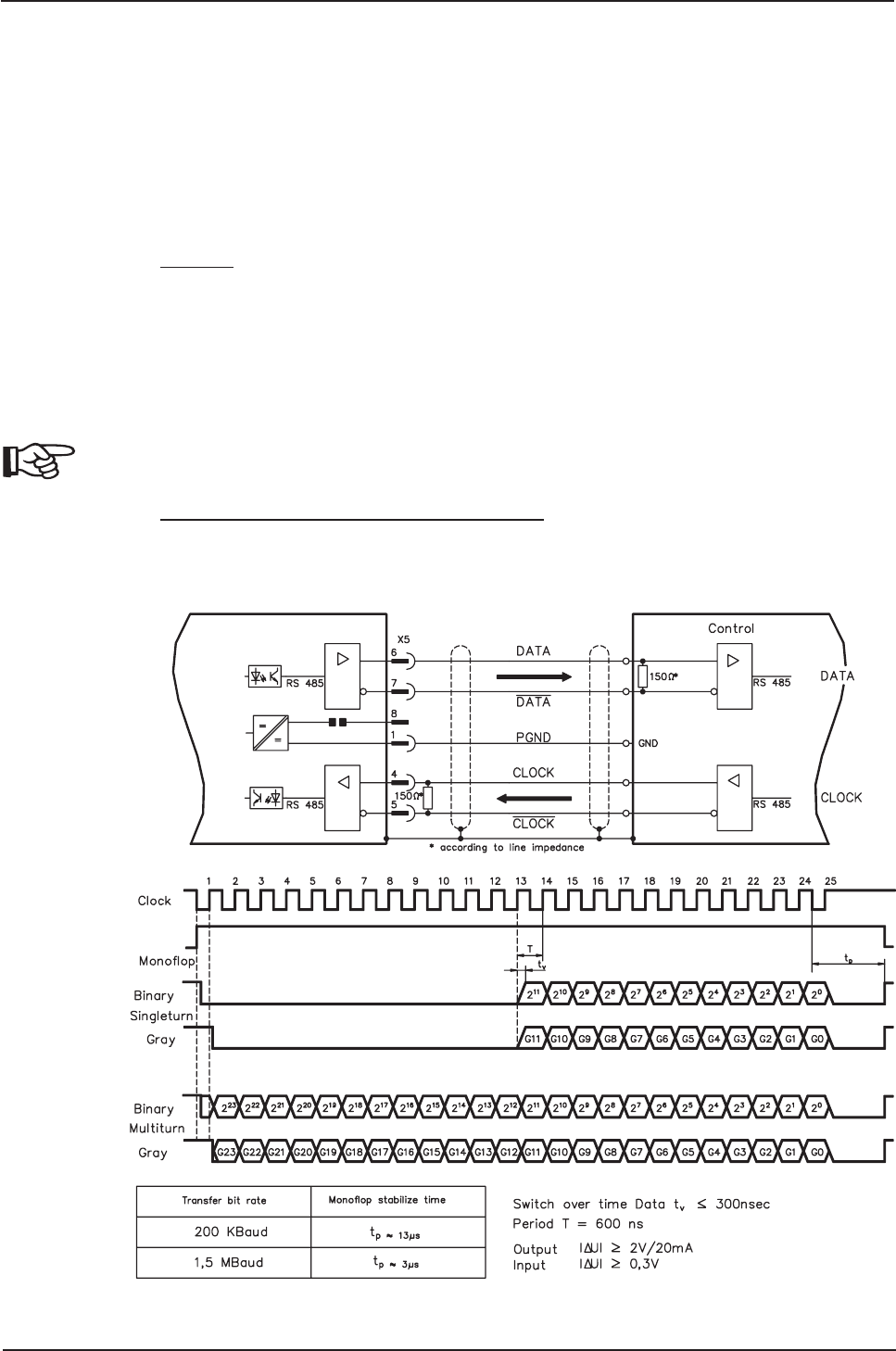
The signal sequence can be output in Gray code (standard) or in binary code (parameter
SSI-CODE). The servo amplifier can be adjusted to the clock frequency of your SSI-evaluation with
the SSI-TAKT parameter (200 kHz or 1.5MHz and inverted).
Drivers are supplied from internal supply voltage. PGND must always be
connected.
Connection and signal description for SSI interface :
Default count direction: upwards when the motor shaft is rotating clockwise (looking at the shaft
end).
64 SERVOSTAR
®
601...620 Product Manual
Electrical Installation
07/2007 Danaher Motion
SERVOSTAR 600