



















10.2.2.5 Connector assignments
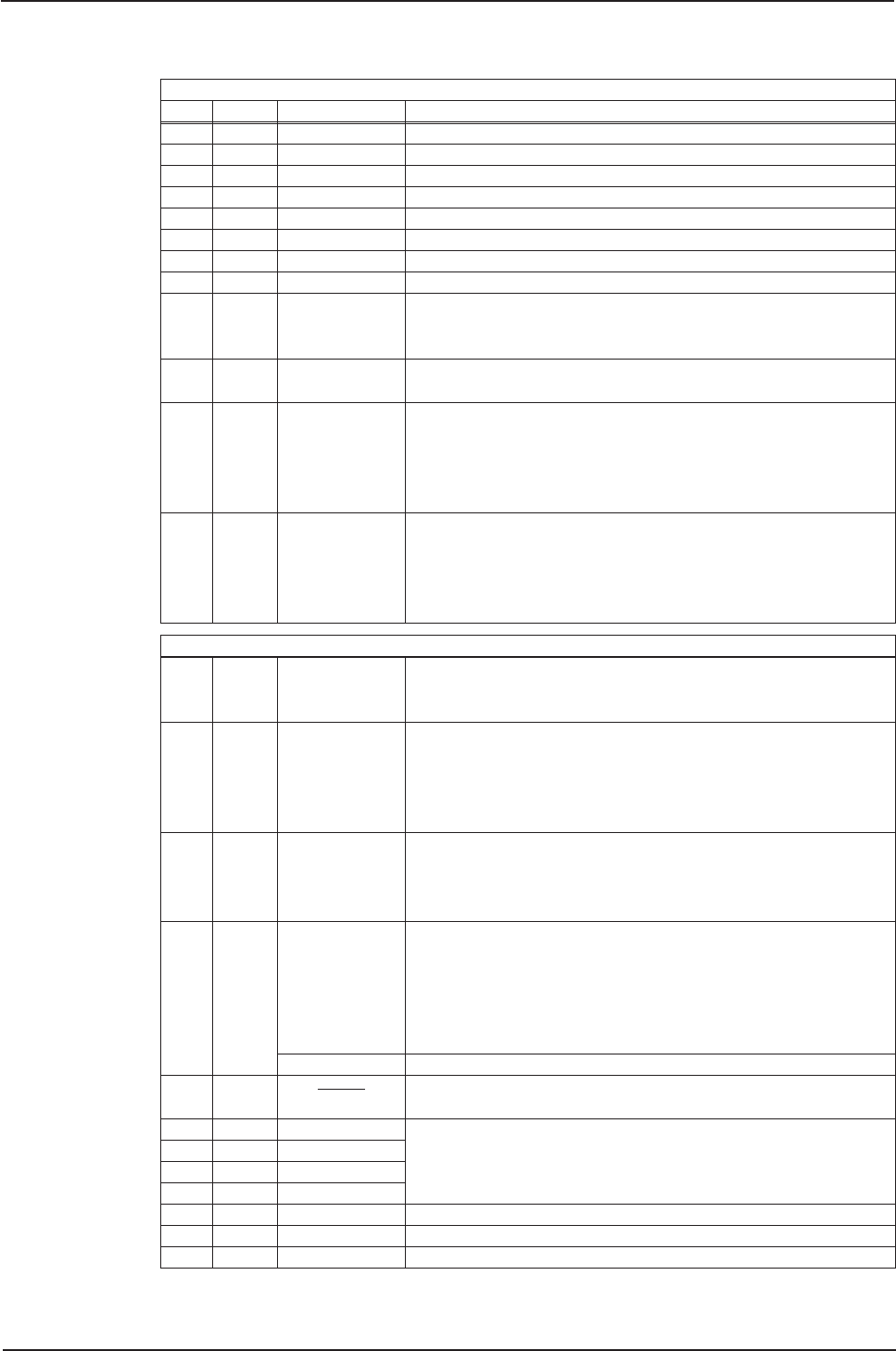
Connector X11A
Pin Dir Function Description
1 In A0 Motion task no., LSB
2 In A1 Motion task no., 2
1
3 In A2 Motion task no., 2
2
4 In A3 Motion task no., 2
3
5 In A4 Motion task no., 2
4
6 In A5 Motion task no., 2
5
7 In A6 Motion task no., 2
6
8 In A7 Motion task no., MSB
9 In Reference
Polls the reference switch. If a digital input on the basic unit is
used as a reference input, then the input on the I/O expansion
card will not be evaluated.
10 In FError_clear
Clear the warning of a following error (no3) or the response
monitoring (n04).
11 In Start_MT Next
The following task, that is defined in the motion task by “Start
with I/O” is started. The target position of the present motion task
must be reached before the following task can be started.
The next motion block can also be started by an appropriately
configured digital input on the basic unit.
12 In Start_Jog v=x
Start of the setup mode "Jog Mode" with a defined speed. After
selecting the function, you can enter the speed in the auxiliary
variable “x”. The sign of the auxiliary variable defines the direc
-
tion. A rising edge starts the motion, a falling edge cancels the
motion.
Connector X11B
1 In MT_Restart
Continues the motion task that was previously interrupted.
The motion task can also be continued by an appropriately con-
figured digital input on the basic unit.
2 In Start_MT I/O
Start of the motion task that has the number that is presented,
bit-coded, at the digital inputs (A0 to A7).
The digital function with the same name, in the basic unit, starts
the motion task with the address from the digital inputs on the
basic unit.
3 Out InPos
When the target position for a motion task has been reached (the
InPosition window), this is signaled by the output of a HIGH-sig
-
nal.
A cable break will not be detected
4 Out
Next-InPos
The start of each motion task in an automatically executed se
-
quence of motion tasks is signaled by an inversion of the output
signal. The output produces a Low signal at the start of the first
motion task of the motion task sequence.
The form of the message can be varied by using ASCII com
-
mands.
PosReg0 Can only be adjusted by ASCII commands.
5 Out FError
A LOW signal indicates that the position has gone outside the
acceptable following error window.
6 Out PosReg1
The preset function of the corresponding position register is indi
-
cated by a HIGH-signal.
7 Out PosReg2
8 Out PosReg3
9 Out PosReg4
10 Out PosReg5 Can only be adjusted by ASCII commands.
11 Supply 24VDC auxiliary supply voltage
12 Supply I/O-GND Digital-GND for the controls
100 SERVOSTAR
®
601...620 Product Manual
Expansions / Accessories
07/2007 Danaher Motion