



















8.12 Electronic Gearing, Master-slave operation
In the case of the “electronic gearing” functionality (see setup software and description of
GEARMODE parameter), the servo amplifier is controlled by a secondary feedback device as a
slave.
It is possible to set up master/slave systems, use an external encoder as a setpoint encoder or con
-
nect the amplifier to a stepper motor control.
The amplifier is parameterized using the setup software (electronic gearing).
Primary Feedback: adjust on screen page "Feedback" (FBTYPE)
Secondary Feedback: adjust on screen pages "Position" and "Gearing" (EXTPOS, GEARMODE)
Master-/Slave adjustment
Master: adjust encoder emulation on screen page "ROD/SSI/Encoder" (ENCMODE)
Slave: adjust on screen pages "Position" and "Gearing" (EXTPOS, GEARMODE)
The following types of external encoder can be used:
secondary Feedback type Connector
Wiring
diagram
GEARMODE
Incremental Encoder 5V X5
ð p.59
3, 5*, 13*, 15*
Incremental Encoder 24V X3
ð p.59
0, 2*, 10*, 12*
Sine/Cosine Encoder X1
ð p.60
6, 8*, 9*, 16*
SSI Encoder X5
ð p.61
7*, 17*
Pulse and Direction 5V X5
ð p.62
4, 14*
Pulse and Direction 24V X3
ð p.62
1, 11*
* adjustable via terminal screen of the setup software
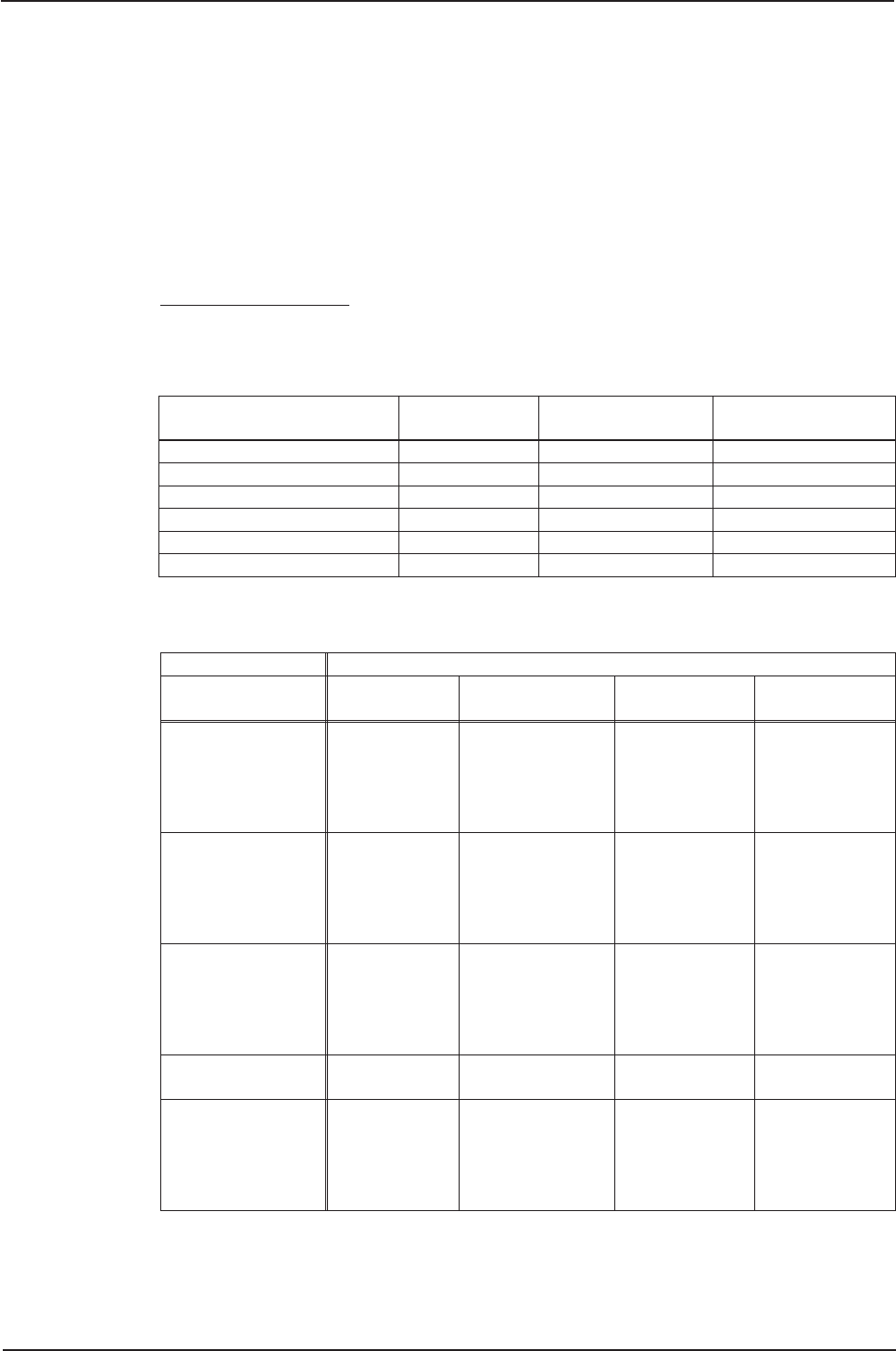
The follwing table shows the allowed feedback combinations:
Secondary Feedback for Position control/Following
Primary Feedback
Sine Encoder
(X1)
Increment. Enco-
der5V/24V (X5/X3)
Pulse&Direct.
5V/24V (X5/X3)
SSI Encoder
(X5)
Resolver (X2)
FBTYPE = 0
EXTPOS = 1,2,3
GEARMODE =
6,8,9,16
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
7,17
FPGA = 1
ENCMODE = 2
Sine Encoder (X1)
FBTYPE = 2,4,6,7,20
-
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 1
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 1
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
7,17
FPGA = 1
ENCMODE = 2
Encoder & Hall (X1)
FBTYPE = 11,12
-
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 1
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 1
ENCMODE = 0
-
RS422 Encoder (X5)
FBTYPE = 8,9
--- -
Sensorless
FBTYPE = 10 -
EXTPOS = 1,2,3
GEARMODE =
0,2,3,5,10,12,13,15
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
1,4,11,14
FPGA = 0
ENCMODE = 0
EXTPOS = 1,2,3
GEARMODE =
7,17
FPGA = 1
ENCMODE = 2
58 SERVOSTAR
®
601...620 Product Manual
Electrical Installation
07/2007 Danaher Motion