



















11 - 2
11. CHARACTERISTICS
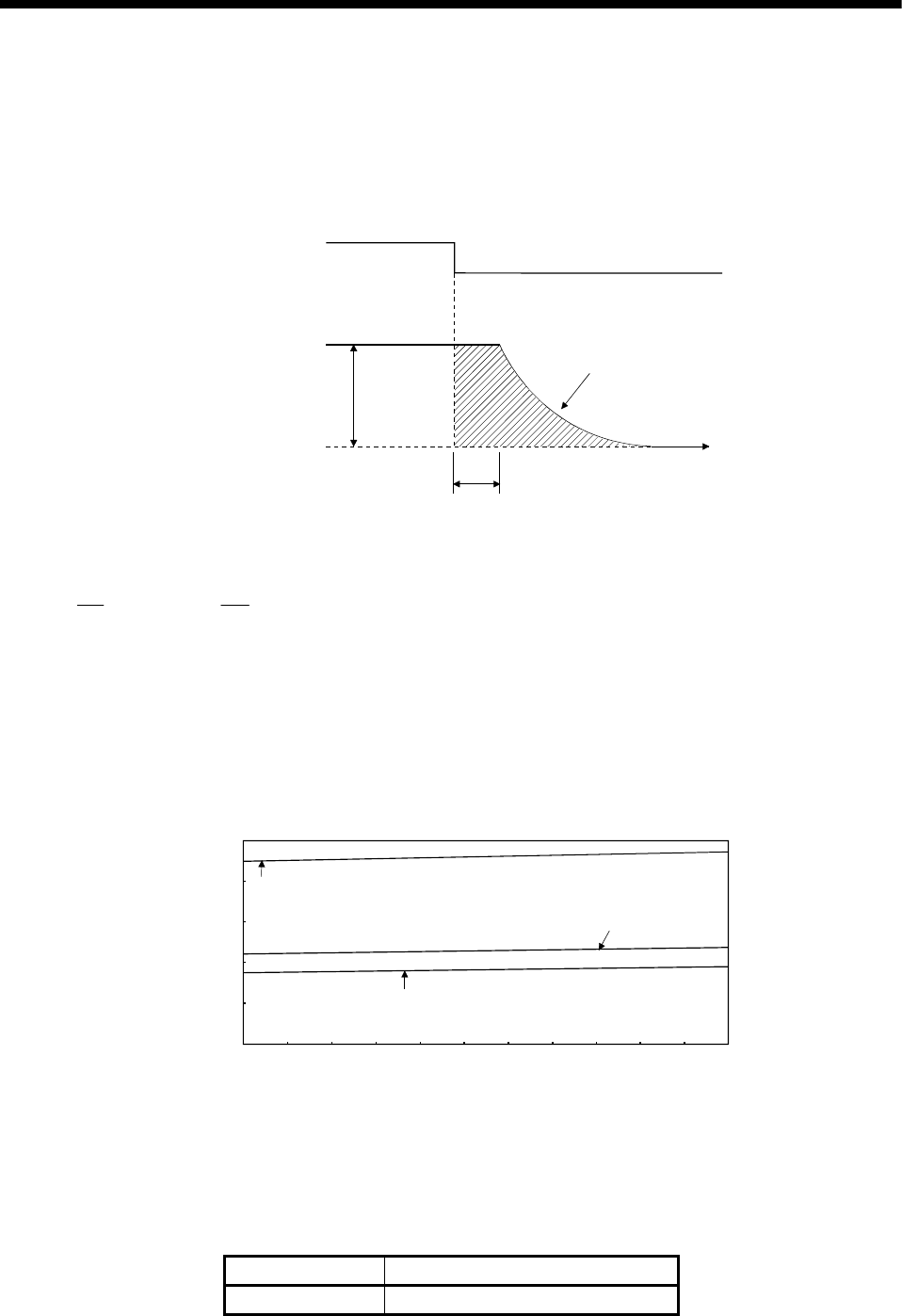
11.2 Dynamic Brake Characteristics
When an alarm, emergency stop or power failure occurs, the dynamic brake is operated to bring the servo
motor to a sudden stop. Fig. 11.2 shows the pattern in which the servo motor comes to a stop when the
dynamic brake is operated. Use Equation 11.1 to calculate an approximate coasting distance to a stop. The
dynamic brake time constant τ varies with the servo motor and machine operation speeds. (Refer to Fig.
11.3.)
V
0
Time constant
τ
Emergency stop (EMG)
OFF
ON
Machine speed
t
e
Time
Fig. 11.2 Dynamic Brake Operation Diagram
Lmax =
60
Vo
x
++
M
L
J
J
1 te (11.1)
L max : Maximum coasting distance [mm][in]
Vo : Machine rapid feedrate [mm/min][in/min]
J
M
: Servo motor inertial moment [kg x cm
2
][oz x in
2
]
J
L
: Load inertia moment converted into equivalent value on servo motor shaft [kg x cm
2
][oz x in
2
]
τ : Brake time constant (Fig. 11.3) [s]
t
e
: Delay time of control section (Fig. 11.2) [s]
(There is internal relay delay time of about 30ms.)
0
0.0005
0.001
0.0015
0.002
0.0025
0 100 400 700 1000 1300 1600
HC-AQ0135
HC-AQ0335
1900
2200
2500 2800
3000
HC-AQ0235
Time constant τ [s]
Speed [r/min]
Fig. 11.3 Dynamic Brake Time Constant
Use the dynamic brake at the load inertia moment indicated in the following table. If the load inertia
moment is higher than this value, the built-in dynamic brake may burn. If there is a possibility that the
load inertia moment may exceed the value, contact Mitsubishi.
Servo Amplifier Load Inertia Moment Ratio [times]
MR-J2-03A5 100