



















7 - 5
7. ADJUSTMENT
7.3 Gain Adjustment by Auto Tuning
7.3.1 Adjustment method
In the factory setting of the servo amplifier, auto tuning is valid and the response setting is "2".
The initial settings provide sufficient tuning for general machines. Higher-level tuning can be provided by
adjusting the response setting (parameter No. 2) according to machine rigidity.
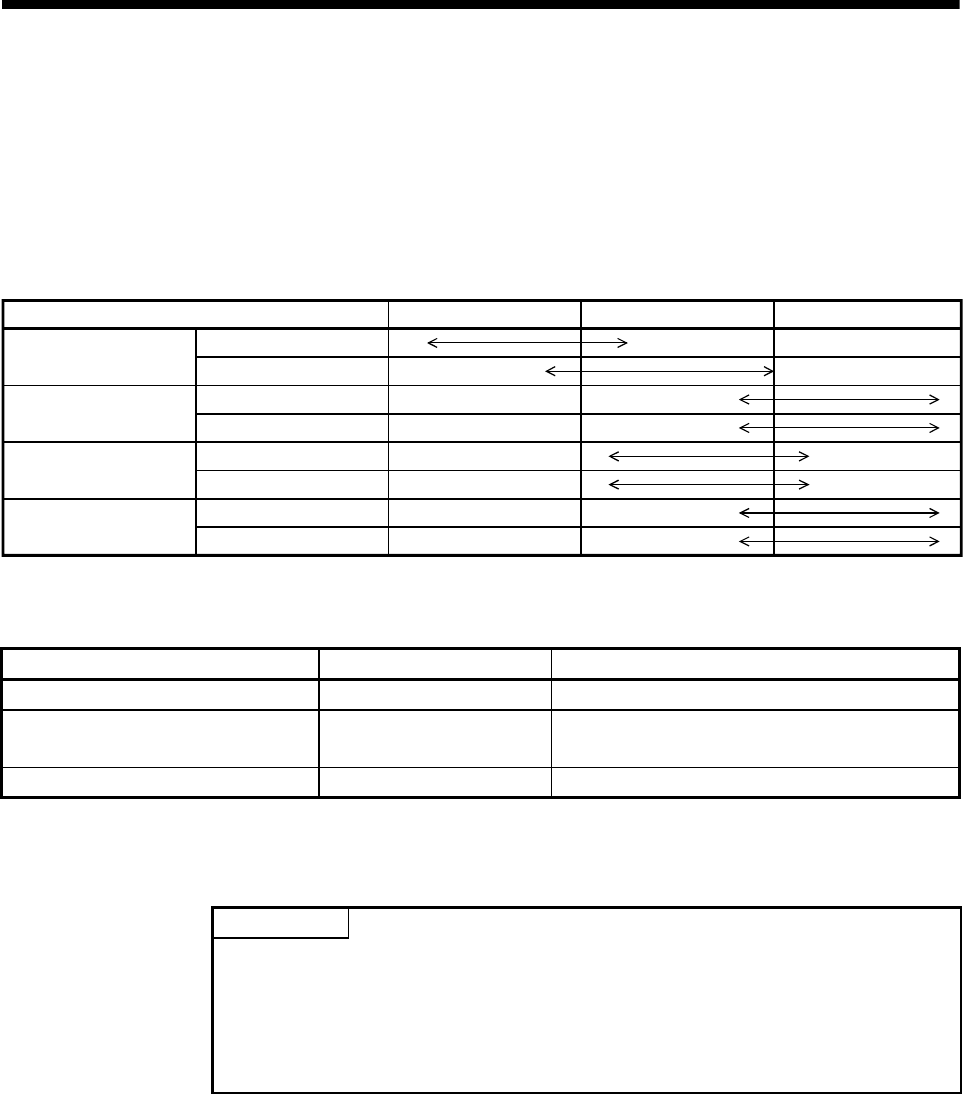
The following table lists guidelines for response setting to drive systems. Choose slow response when using
a reduction gear having backlash:
Main Drive System
Ballscrew
Rack & pinion
Timing belt
Chain
Direct coupling
With reduction gear
Direct coupling
With reduction gear
Direct coupling
With reduction gear
Direct coupling
With reduction gear
Fast Response
Middle Response
Slow Response
The following is how to adjust the response setting to machine phenomena:
Actual Machine Operation Ideal Machine Operation Parameter No. 2 Setting
Settling time is long Reduce settling time. Increase response setting.
Large overshoot at stop Reduce overshoot.
Decrease response setting.
Set machine selection setting to "large friction".
Gear sound generated from machine Reduce gear sound. Decrease response setting.
Note: Settling time indicates time from zero command pulse to servo motor stop.
7.3.2 Valid conditions
POINT
• If the acceleration/deceleration time is long or the motor speed used is only
low speed, the valid conditions of auto tuning are not satisfied. Therefore, it
may result in false tuning.
In this case, after performing operation which satisfies the auto tuning
conditions, set parameter No. 20 to "auto tuning not executed".
This section provides constraints on the operation pattern to enable excellent auto tuning. If the conditions
in this section cannot be satisfied, normal auto tuning may not be performed. In this case, after executing
auto tuning in operation which satisfies the conditions given in this section, make auto tuning invalid to
disallow the gain setting from being changed.
(1) Set the acceleration time (time until the preset speed is reached) to 5s or less and the acceleration/
deceleration current to 50% or more.
(2) Perform operation several times until the cumulative acceleration/deceleration time is 1s or more.
(3) Set the servo motor speed to 500r/min or more.