

















5 - 5
5. PARAMETERS
Classifi-
cation
No. Symbol Name and Function
Initial
Value
Unit
Setting
Range
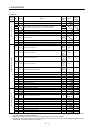
Feedback pulse number
Set the number of pulses per revolution in the controller side command
unit. Information on the motor such as the feedback pulse value, present
position, droop pulses and within-one-revolution position are derived
from the values converted into the number of pulses set here.
Setting Number of feedback pulses
0 16384
1 8192
6 32768
7 131072
255 Depending on the number of motor resolution pulses.
POINT
If the number of pulses set exceeds the actual motor
resolution, the motor resolution is set automatically.
6*FBP 0 Refer to
name
and
function
column.
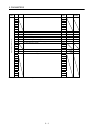
7 *POL Rotation direction selection
Used to select the rotation direction of the servo motor.
0: Forward rotation (CCW) with the increase of the positioning
address.
1: Reverse rotation (CW) with the increase of the positioning
address.
CCW
CW
0 Refer to
name
and
function
column.
Basic parameters
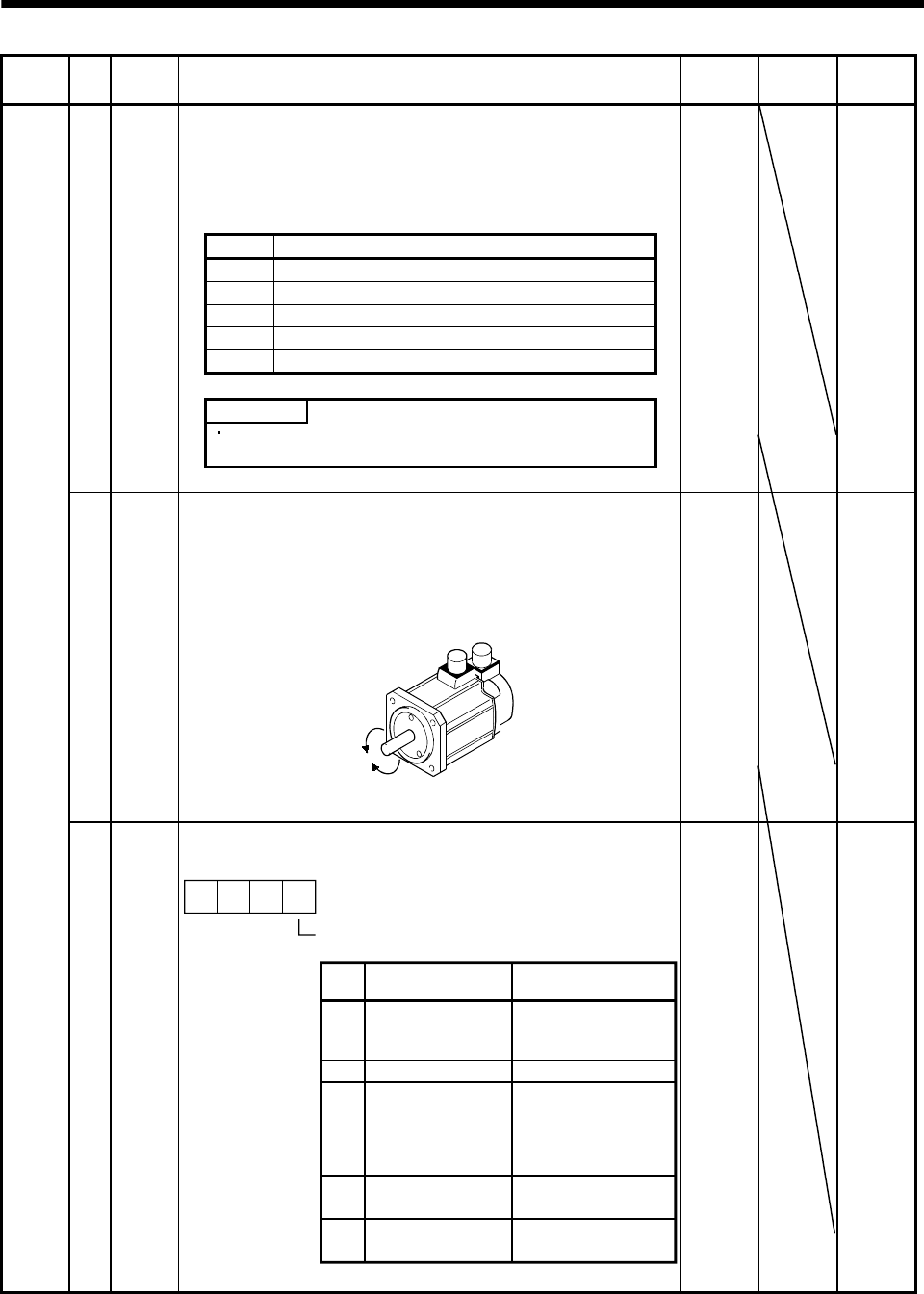
8 ATU Auto tuning
Used to select the gain adjustment mode of auto tuning.
Fixes the load inertia
moment ratio set in
parameter No. 12.
Response level setting
can be changed.
000
Gain adjustment mode selection
(For details, refer to section 6.1.1.)
Set
value
Gain adjustment
mode
Description
0 Interpolation mode Fixes position control
gain 1 (parameter
No. 13).
Auto tuning mode 1 Ordinary auto tuning.1
3
4
Auto tuning mode 2
Manual mode1 Simple manual
adjustment.
2 Manual mode 2 Manual adjustment of
all gains.
0001 Refer to
name
and
function
column.