



















11 - 5
11. CHARACTERISTICS
11.3 Dynamic brake characteristics
11.3.1 Dynamic brake operation
(1) Calculation of coasting distance
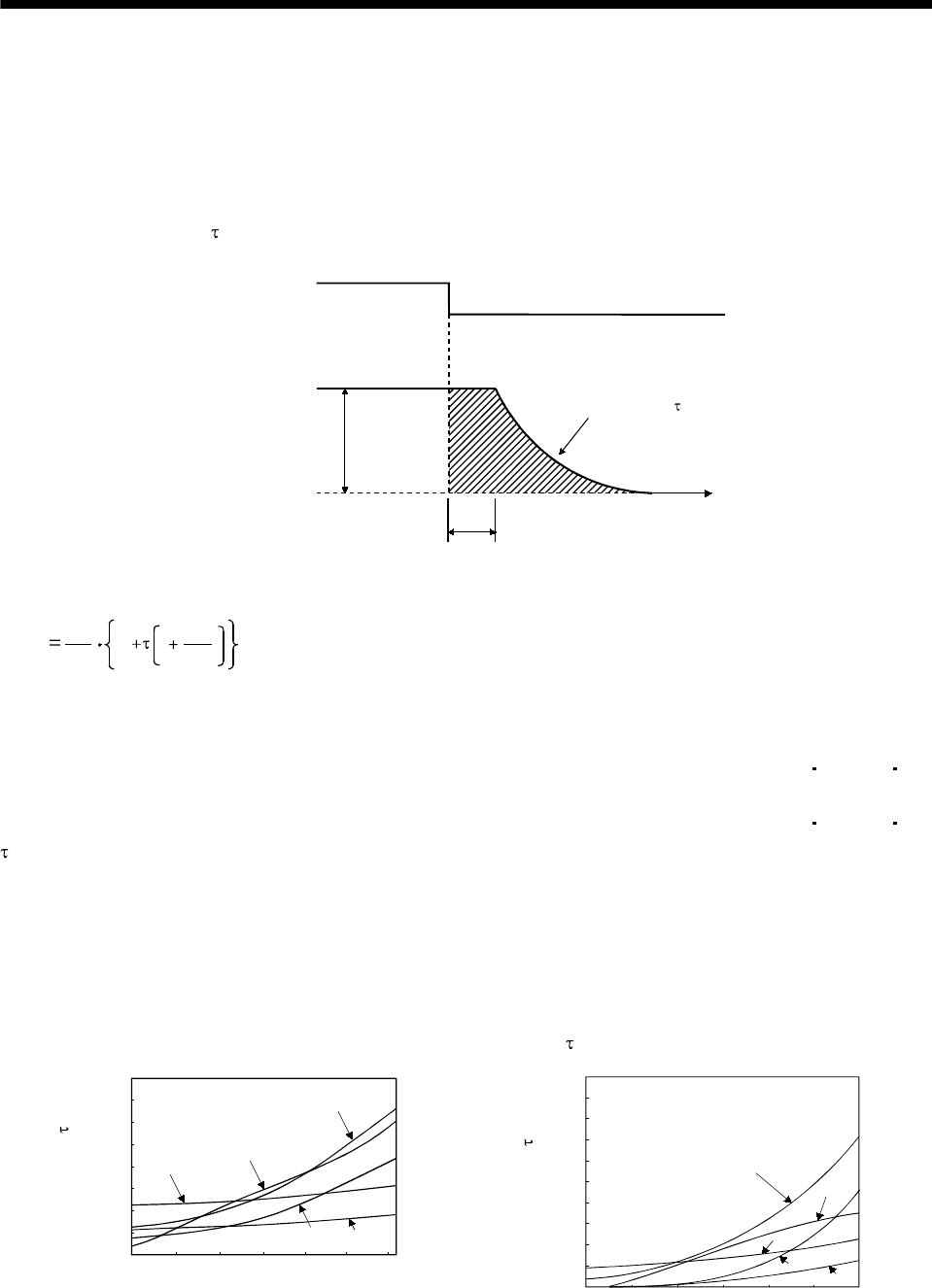
Fig. 11.3 shows the pattern in which the servo motor comes to a stop when the dynamic brake is
operated. Use Equation 11.2 to calculate an approximate coasting distance to a stop. The dynamic
brake time constant
varies with the servo motor and machine operation speeds. (Refer to (2) in this
section.)
V
0
Time constant
Forced stop(EM1)
OFF
ON
Machine speed
t
e
Time
Fig. 11.3 Dynamic brake operation diagram
L
max
60
V
0
JL
JM
t
e
1
....................................................................................................................... (11.2)
L
max : Maximum coasting distance .................................................................................................[mm][in]
Vo : Machine rapid feed rate ........................................................................................ [mm/min][in/min]
J
M
: Servo motor inertial moment.................................................................................[kg cm
2
][oz in
2
]
J
L
: Load inertia moment converted into equivalent value on servo motor shaft
.................................................................................................................................[kg
cm
2
][oz in
2
]
: Brake time constant ........................................................................................................................ [s]
t
e : Delay time of control section...........................................................................................................[s]
For 7kW or less servo, there is internal relay delay time of about 30ms. For 11k to 22kW servo,
there is delay time of about 100ms caused by a delay of the external relay and a delay of the
magnetic contactor built in the external dynamic brake.
(2) Dynamic brake time constant
The following shows necessary dynamic brake time constant for the equations (11.2).
Speed[r/min]
0
14
16
2
4
8
10
6
12
0 500 1000 1500 2000 2500 3000
13
73
23
43
053
Time constant [ms]
0
Speed [r/min]
Time constant [ms]
20
18
16
14
12
10
8
6
4
2
0
500 1000 1500 2000 2500 3000
23
73
053
43
13
HC-KFS series HC-MFS series