



















Parameter settings:
The position value is calculated as follows:
X = PA05 Ⴇ PC07 in [mm]
In the above example with PA05 = 1 and PC07 = 1000 [10
STM
µm] this gives us:
X = 1000 Ⴇ 10
1
µm
Home Position Return Positioning with Digital Inputs
4-22 MITSUBISHI ELECTRIC
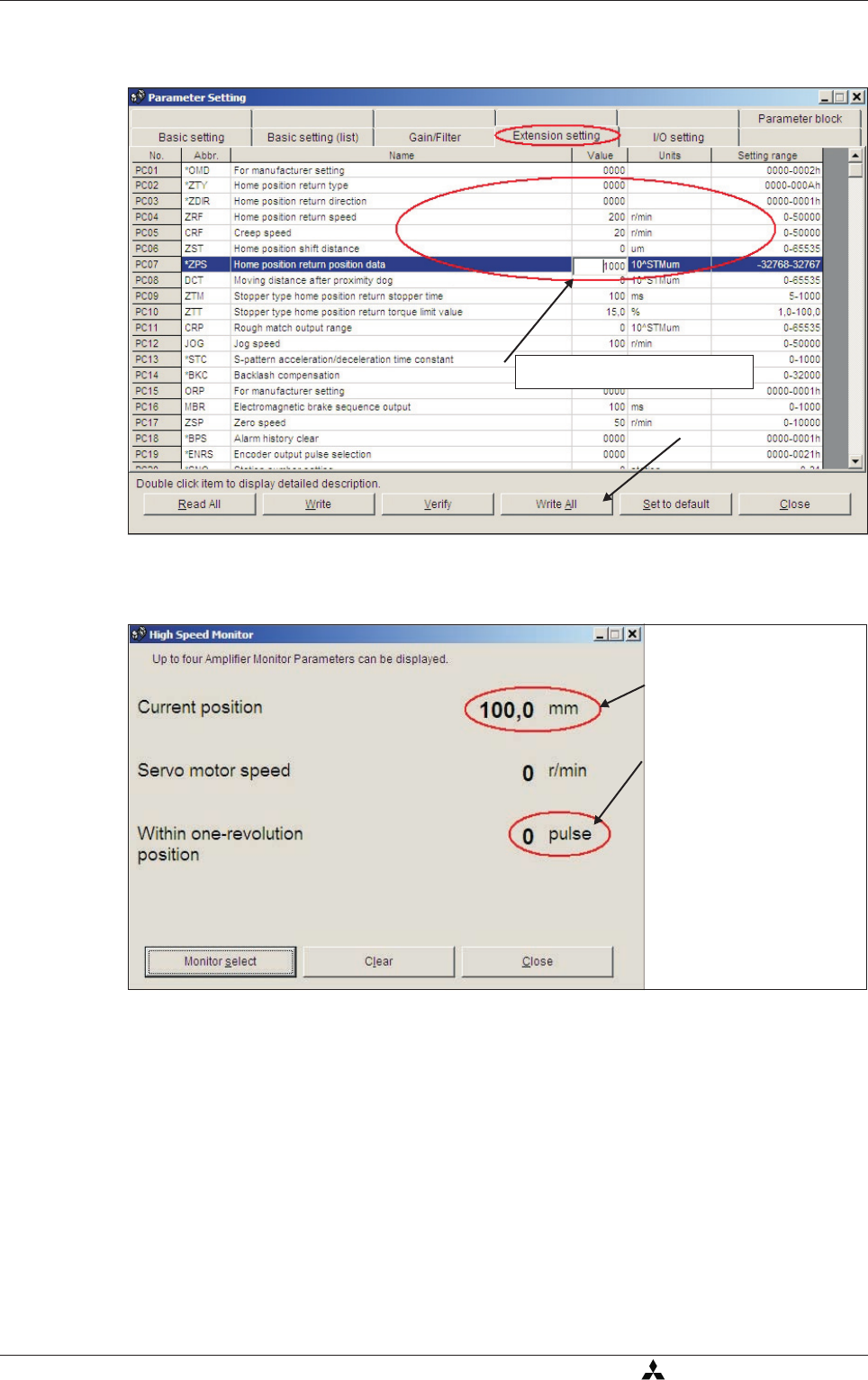
Fig. 4-11: Relevant parameter settings for the example. The home position value is en-
teredwithPC07.
ᕢ
ᕡ
Parameter settings for example
Fig. 4-12: Values shown when the home position return has been completed correctly
Following completion of the
home position return:
The servo motor has travelled to
the encoder home position
which is also the machine’s
physical home position. How-
ever, this position corresponds
to a value of 100mm in the ma-
chine’s coordinate system.