



















ባ
Perform a home positionreturn asinexample 1but with an offsetbetween the physical and
encoder home positions, set with parameter PC06.
Parameter settings:
Home Position Return Positioning with Digital Inputs
4-18 MITSUBISHI ELECTRIC
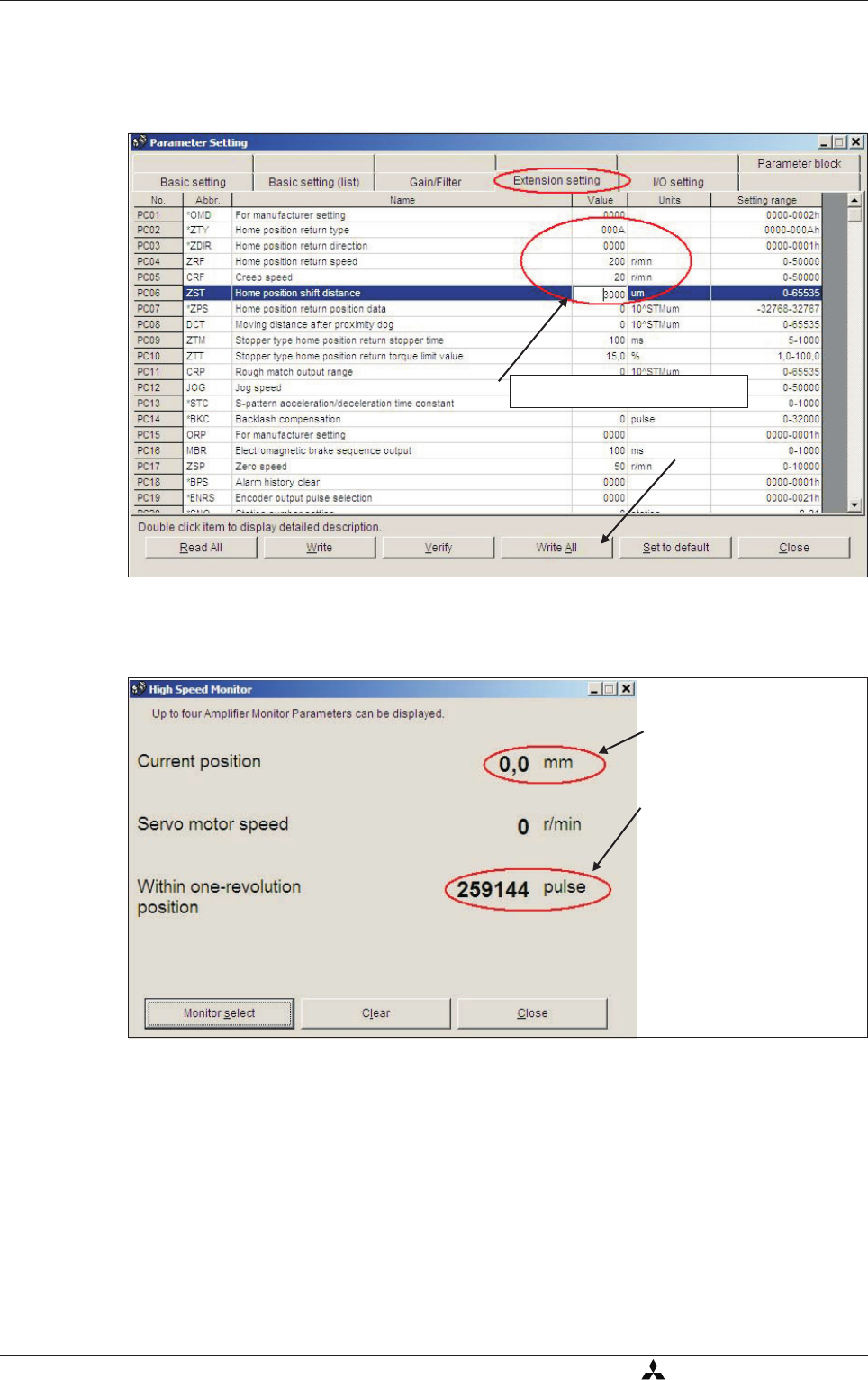
Fig. 4-8: Relevant parameter settings for example 2. The offset is entered with param-
eter PC06.
ᕢ
ᕡ
Parameter settings for example
Fig. 4-9: Values shown when the home position return has been completed correctly
Following completion of the home
position return:
The servo motor has travelled to
the specified home position. The
home position of the encoder has
been exceeded by the value of
PC06 = 3,000 µm. For the motor
connected this is equivalent to
259,144 encoder pulses.