

















5 - 6
5. PARAMETERS
Classifi-
cation
No. Symbol Name and Function
Initial
Value
Unit
Setting
Range
14 VG1 Speed loop gain 1
Normally this parameter setting need not be changed. Higher setting
increases the response level but is liable to generate vibration and/or
noise.
When auto tuning mode 1,2 and interpolation mode is selected, the
result of auto tuning is automatically used.
177 rad/s 20
to
5000
15 PG2 Position loop gain 2
Used to set the gain of the position loop.
Set this parameter to increase position response to load disturbance.
Higher setting increases the response level but is liable to generate
vibration and/or noise.
When auto tuning mode 1
2, manual mode and interpolation mode
is selected, the result of auto tuning is automatically used.
35 rad/s 1
to
1000
16 VG2 Speed loop gain 2
Set this parameter when vibration occurs on machines of low
rigidity or large backlash.
Higher setting increases the response level but is liable to generate
vibration and/or noise.
When auto tuning mode 1
2 and interpolation mode is selected, the
result of auto tuning is automatically used.
817 rad/s 20
to
20000
17 VIC Speed integral compensation
Used to set the constant of integral compensation.
When auto tuning mode 1
2 and interpolation mode is selected, the
result of auto tuning is automatically used.
48 ms 1
to
1000
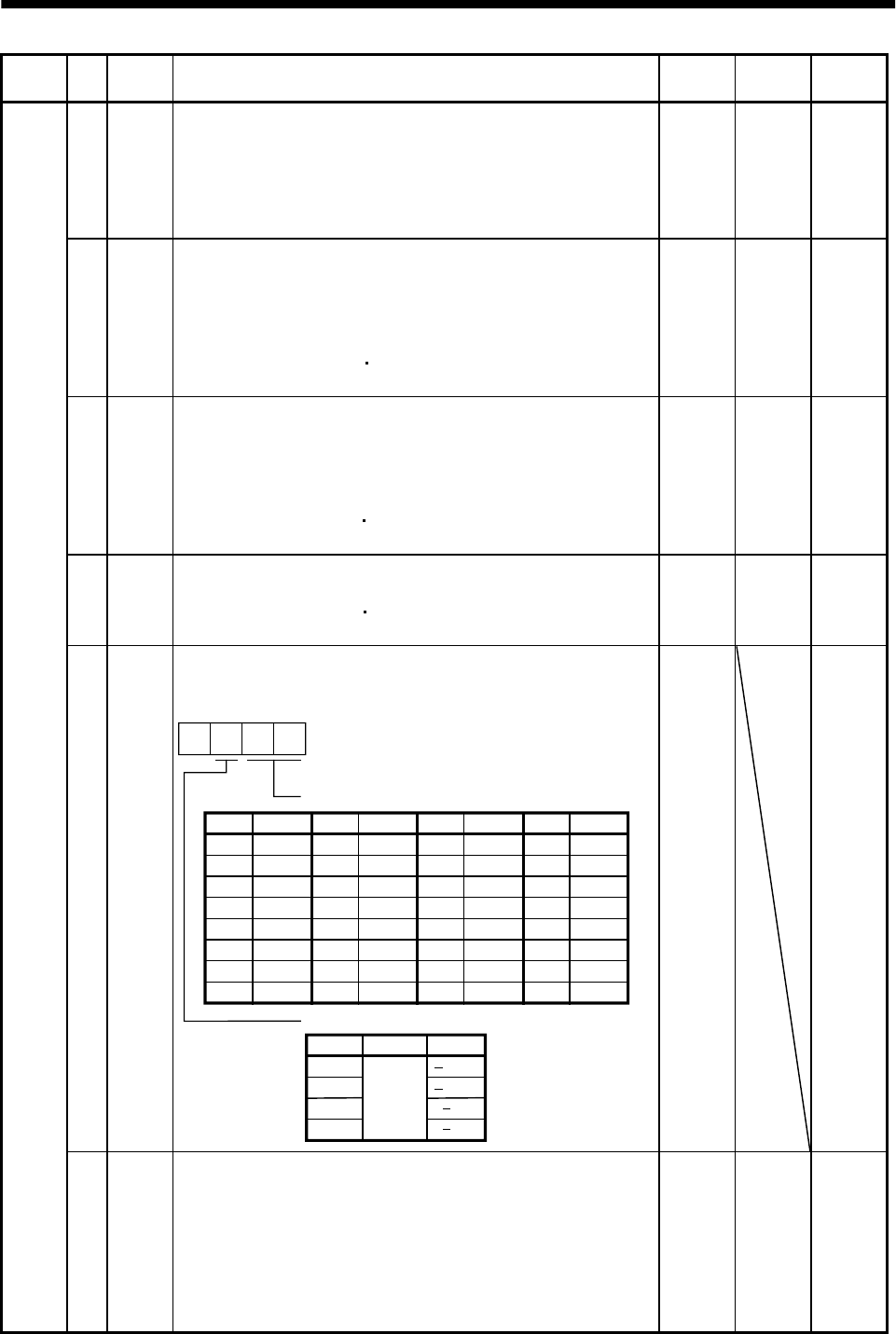
18 NCH Machine resonance suppression filter 1 (Notch filter)
Used to select the machine resonance suppression filter.
(Refer to Section 7.2.)
2
3
0
0
1
Notch frequency selection
00
01
02
03
04
05
06
07
Setting
Frequency
Invalid
4500
2250
1500
1125
900
750
642.9
08
09
0A
0B
0C
0D
0E
0F
Setting
562.5
500
450
409.1
375
346.2
321.4
300
Frequency
10
11
12
13
14
15
16
17
Setting
281.3
264.7
250
236.8
225
214.3
204.5
195.7
Frequency
18
19
1A
1B
1C
1D
1E
1F
Setting
187.5
180
173.1
166.7
160.1
155.2
150
145.2
Frequency
Notch depth selection
Setting Depth Gain
Deep
Shallow
to
4dB
40dB
14dB
8dB
0 Refer to
name
and
function
column.
Adjustment parameters
19 FFC Feed forward gain
Used to set the feed forward gain for position control. Set "100" to
nearly zero the droop pulse value when operation is performed at
constant speed.
Note that sudden acceleration/deceleration will increase overshoot.
As a guideline, when you set the feed forward gain for 100%, set the
acceleration/deceleration time constant to/from the rated speed for 1s
or longer.
0%0
to
100