



















1 - 4
1. FUNCTIONS AND CONFIGURATION
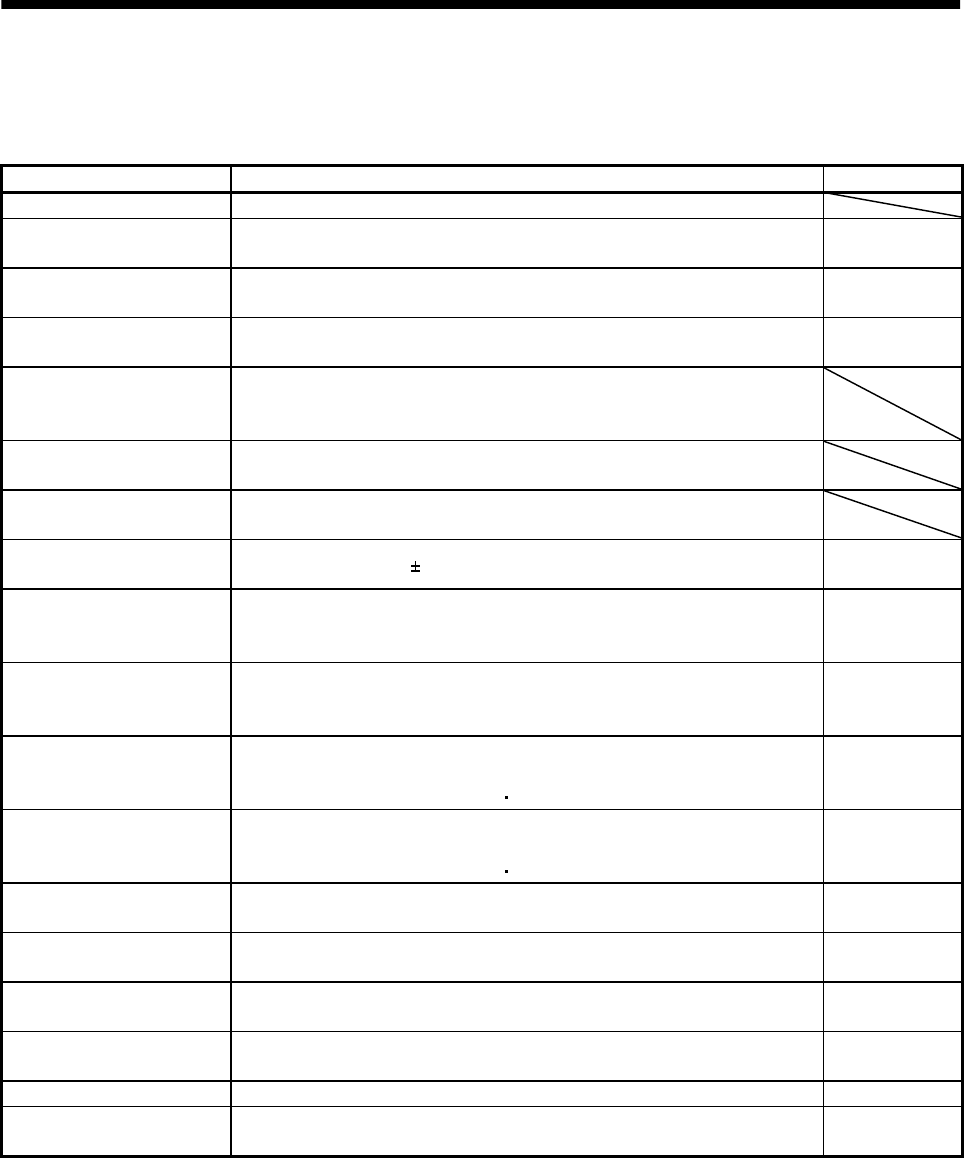
1.4 Function list
The following table lists the functions of this servo. For details of the functions, refer to the corresponding
chapters and sections.
Function Description Refer to
High-resolution encoder High-resolution encoder of 131072 pulses/rev is used as a servo motor encoder.
Absolute position detection
system
Merely setting a home position once makes home position return unnecessary
at every power-on.
Chapter 13
Adaptive vibration
suppression control
Servo amplifier detects mechanical resonance and sets filter characteristics
automatically to suppress mechanical vibration.
Section 7.3
Low-pass filter
Suppresses high-frequency resonance which occurs as servo system response is
increased.
Section 7.4
Machine analyzer function
Analyzes the frequency characteristic of the mechanical system by simply
connecting a servo configuration software-installed personal computer and
servo amplifier.
Machine simulation
Can simulate machine motions on a personal computer screen on the basis of
the machine analyzer results.
Gain search function
Personal computer changes gains automatically and searches for overshoot-
free gains in a short time.
Slight vibration suppression
control
Suppresses vibration of
1 pulse produced at a servo motor stop. Parameter No.24
Auto tuning
Automatically adjusts the gain to optimum value if load applied to the servo
motor shaft varies. Higher in performance than MELSERVO-J2 series servo
amplifier.
Chapter 6
Regenerative brake option
Used when the built-in regenerative brake resistor of the servo amplifier does
not have sufficient regenerative capability for the regenerative power
generated.
Section 12.1.1
Brake unit
Used when the regenerative brake option cannot provide enough regenerative
power.
Can be used with the MR-J2S-500B
MR-J2S-700B.
Section 12.1.2
Return converter
Used when the regenerative brake option cannot provide enough regenerative
power.
Can be used with the MR-J2S-500B
MR-J2S-700B.
Section 12.1.3
Torque limit Servo motor-generated torque can be limited to any value.
Parameters
No.10, 11
Forced stop signal automatic
ON
Forced stop signal (EM1) can be automatically switched on internally to
invalidate it.
Parameter No.23
Output signal (DO) forced
output
Output signal can be forced on/off independently of the servo status.
Use this function for output signal wiring check, etc.
Section 4.4
(1) (e)
Test operation mode
Servo motor can be run from the operation section of the servo amplifier
without the start signal entered.
Section 4.4
Analog monitor output Servo status is output in terms of voltage in real time. Parameter No. 22
Servo configuration software
Using a personal computer, parameter setting, test operation, status display,
etc. can be performed.
Section 12.1.7