40
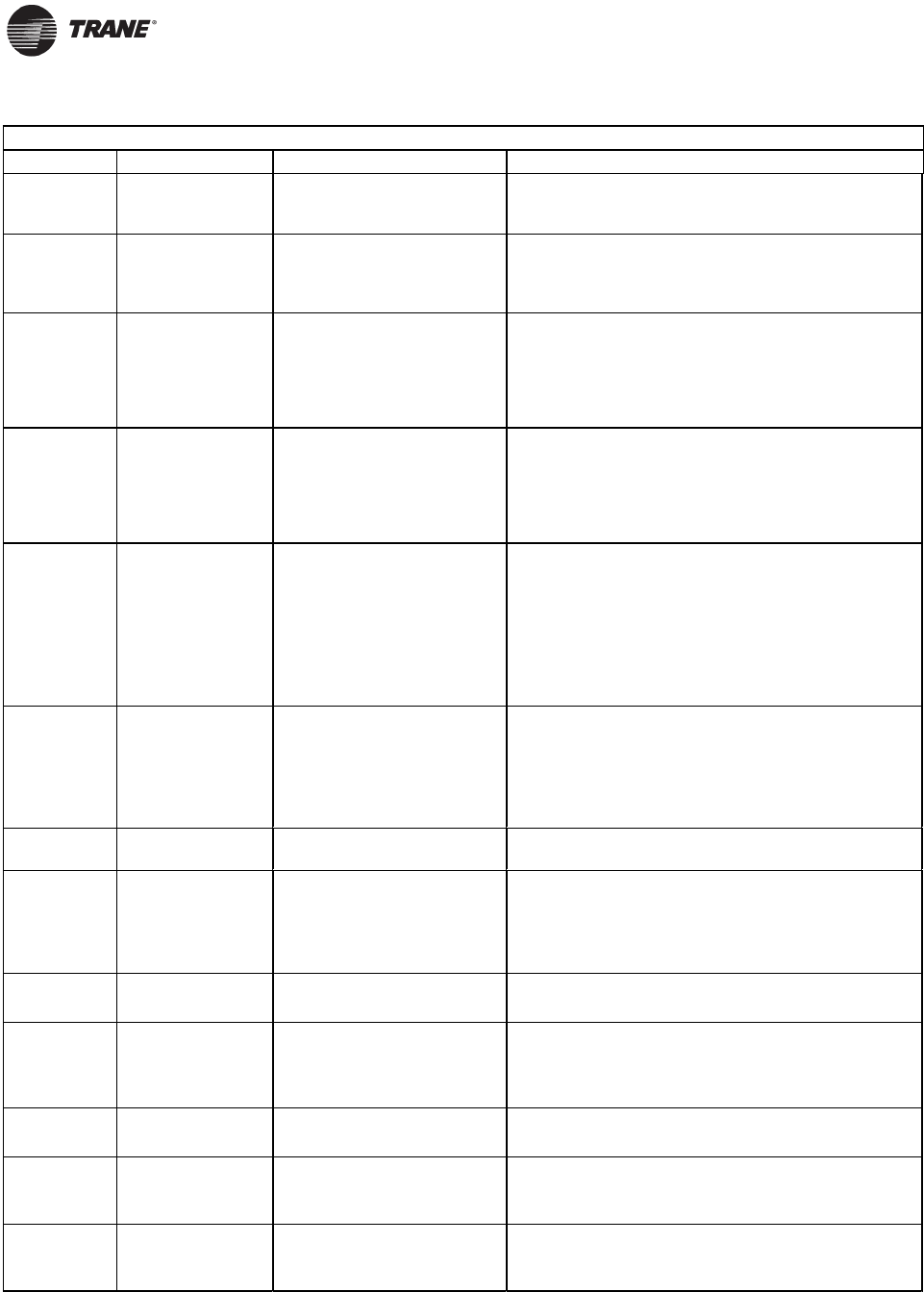
Parameters for Closed Loop Monitor through LON (Scenario B)
Parameter Description Setting Comment
415 REF./FDBK.UNIT As required This is the unit that is used to express the feedback and
setpoint reference.
416 FEEDBACK CONV.
LINEAR
(most commonly)
The two choices here are LINEAR and SQUARE ROOT.
SQUARE ROOT is generally used when a pressure feedback
signal is used to measure flow.
417 2 FEEDBACK
CALC
MAXIMUM
(most commonly)
This parameter is used to determine how the drive deals with
two feedback signals, which would be applied to terminals 53
and 54. If only one feedback signal is used, select MAXIMUM.
Refer to the drive’s Instruction Manual if more than one
feedback signal is used.
418 SETPOINT 1
0
Units: as set in parameter
415
This scenario states that the setpoint should be entered via the
serial bus. If that is the case, no value should be entered from
the keypad.
If the setpoint will instead be entered manually via the keypad,
this parameter is used to store the setpoint.
419 SETPOINT 2
0
Units: as set in parameter
415
SETPOINT 2 is only needed when two feedback signals are
compared against individual setpoints.
This scenario states that the setpoint should be entered via the
serial bus. If that is the case, no value should be entered from
the keypad.
If this setpoint will instead be entered manually via the keypad,
this parameter is used to store SETPOINT 2.
420 PID NOR/INV.CTRL
NORMAL
(most commonly)
This parameter determines how the motor’s speed will be
controlled by the drive’s closed loop controller.
NORMAL is used when a low feedback signal should cause the
motor’s speed to increase.
INVERSE is used when a low feedback signal should cause the
motor’s speed to decrease.
421 PID ANTIWINDUP
ENABLE There is seldom a need to change this.
422 PID START VALUE
As required When the drive is given a start signal, it will first accelerate to
this frequency before activating its PID controller. This can
help ensure that the system is pressurized before closed loop
control begins. It can also be used to help the drive quickly
reach a stable operating point after it is started.
423 PID PROP. GAIN
As required This is the proportional gain (“P”) value for the drive’s PID
controller. The range is from 0 to 10.
424 PID INTEGR.TIME
As required This is the integral time (“I”) value for the drive’s PID
controller. The range is from 0.01 s to 9999.00 s to OFF. It is
important to ensure that this value is NOT left in the OFF
position.
425 PID DIFF. TIME
OFF This is the differential gain (“D”) value for the drive’s PID
controller. It is generally not used in HVAC applications.
426 PID DIFF.GAIN
5.0 This value sets the maximum effect of the “D” value of the PID
controller for a step change in the error signal. This value is
only used if parameter 415 is not set to OFF.
427 PID FILTER TIME
0.01 s This is the time base for the feedback signal’s low pass filter.
The range is from 0.01 s to 10.00 s. Larger numbers provide
more filtering.













































