39
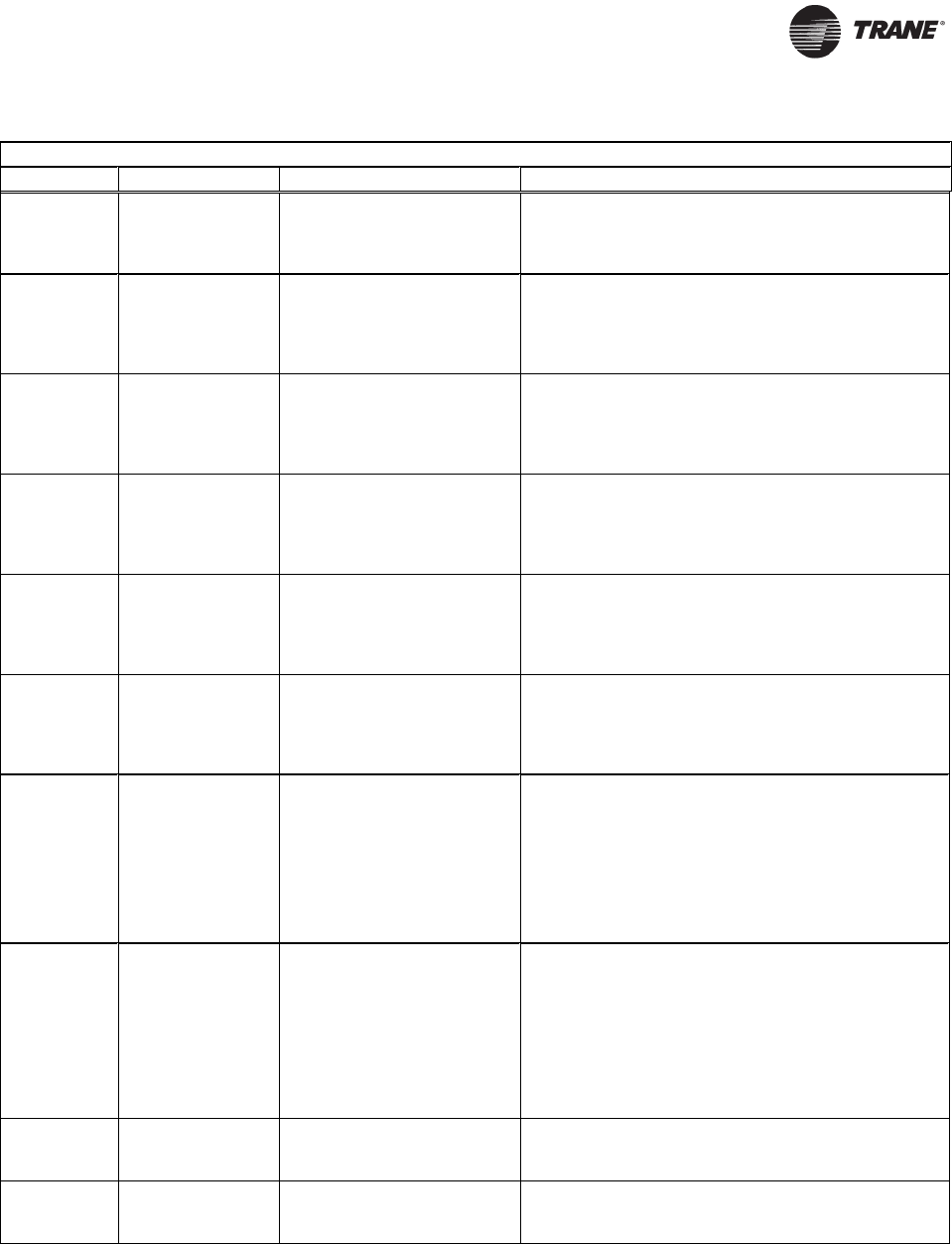
Parameters for Closed Loop Monitor through LON (Scenario B)
Parameter Description Setting Comment
100 CONFIG. MODE CLOSED LOOP FORWARD Sets up the drive to accept a feedback signal, to compare it to a
setpoint reference signal, and to control the speed of the drive
based on the difference between these two values.
204 MIN. REFERENCE
The value set in parameter 413
(most commonly) Units: as set in
parameter 415
This is the lowest value that can be used as the setpoint
reference. Generally it is set for the lowest value that the sensor
can measure, although it can be set higher to restrict the
possible range of the setpoint.
205 MAX. REFERENCE
The value set in parameter
414Units: as set in parameter 415
This is the highest value that can be used as the setpoint
reference. Generally it is set for the highest value that the
sensor can measure, although it can be set lower to restrict the
possible range of the setpoint.
308 AI [V] 53 FUNCT. FEEDBACK
or
NO OPERATION
This determines if analog input 53 is used for the feedback
signal. If it is, the scaling of this input is controlled by
parameters 309 and 310. If it isn’t, this should be set to
NO OPERATION.
311 AI [V] 54 FUNCT. FEEDBACK
or
NO OPERATION
This determines if analog input 54 is used for the feedback
signal. If it is, the scaling of this input is controlled by
parameters 312 and 313. If it isn’t, this should be set to
NO OPERATION.
314 AI [mA] 60 FUNCT FEEDBACK
or
NO OPERATION
This determines if analog input 60 is used for the feedback
signal. If it is, the scaling of this input is controlled by
parameters 315 and 316. If it isn’t, this should be set to
NO OPERATION.
317 LIVE ZERO TIME 10 s If the minimum feedback signal is not 0 (e.g. 4 mA or 2 V), the
drive can detect the loss of the signal and take the action
selected in parameter 318. This parameter sets the time delay
between when the signal is lost and when the action is taken.
This timer is activated when an active analog signal drops to
less than half of its minimum value. For example, when a 4 –
20 mA signal drops to less than 2 mA.
318 LIVE ZERO
FUNCT.
As required
This parameter sets the drive’s action when an active analog
input signal with a non-zero minimum value. See the drive’s
Instruction Manual for choices.
While the Live Zero function can be used in Open Loop
operation, when the building automation system sends the
drive a speed reference signal, it is most commonly used
Closed Loop applications, where a loss of a feedback signal
could cause the drive to accelerate to full speed.
413 MIN. FEEDBACK
0 (most commonly)
Units: as set in parameter 415
This is the feedback signal that is represented by the minimum
signal from the sensor.
414 MAX. FEEDBACK As required
Units: as set in parameter 415
This is the feedback signal that is represented by the maximum
signal from the sensor.













































