38
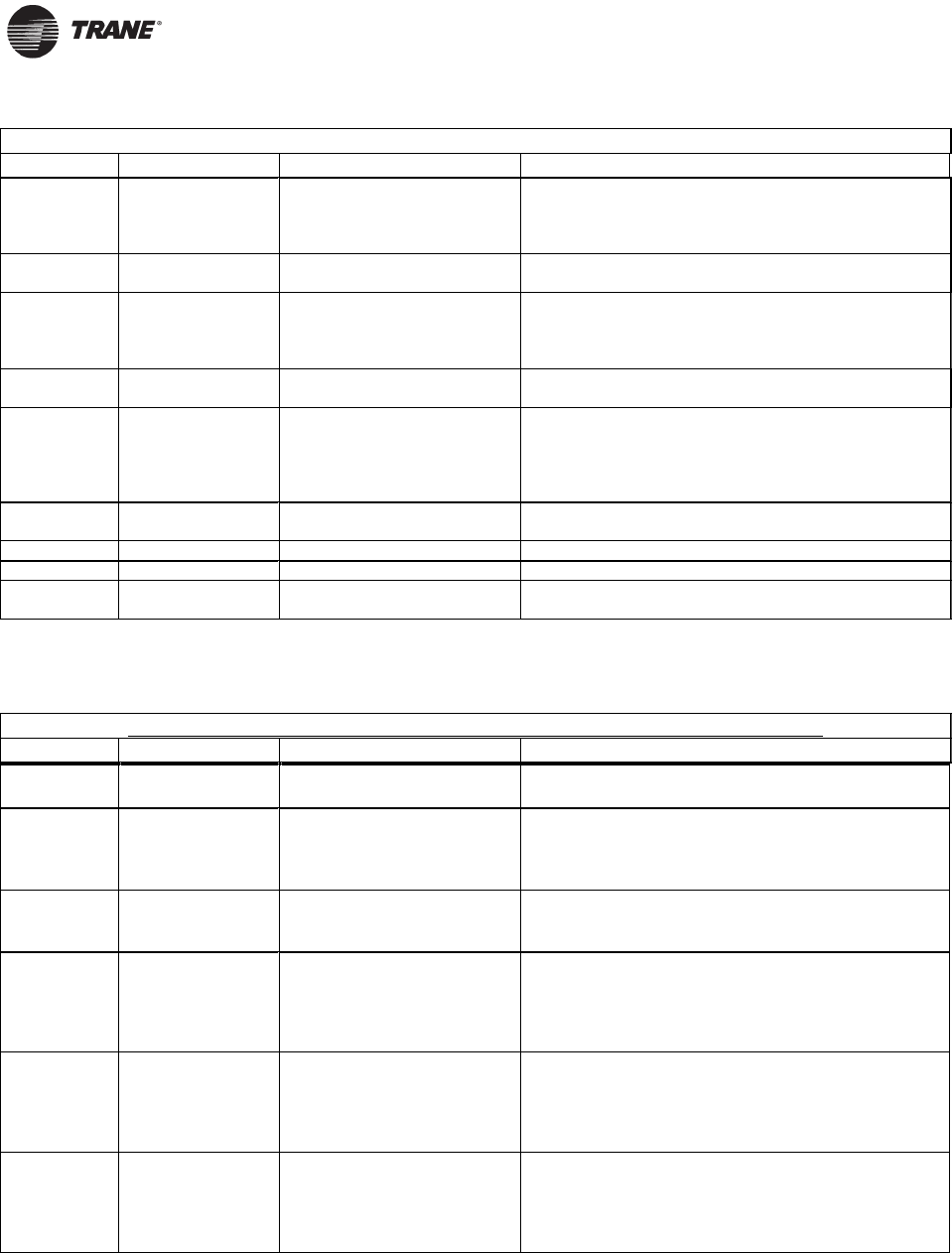
General Parameter Settings (Continued)
Parameter Description Setting Comment
215
FREQ BYPASS
B.W.
OFF
This allows the drive to "step over" troublesome speeds, like
speeds where the balance of a large axial fan isn't quite right.
For your tests you don't want to exclude any operating speeds.
300 – 328 Refer to IOM
These settings are for Closed Loop, local override and safety
controls.
402 FLYING START DISABLE
In normal fan applications, enabling flying start helps the drive
synchronize with a motor that might be rotating. In
demonstration applications, this synchronization procedure can
be confusing.
415
Reference Feedback
Units
% Set according to transmitter type used in Closed Loop control.
500 PROTOCOL FC
Set parameter 927, PARAMETER EDIT, to ENABLE.
Set parameter 928, PROCESS CONTROL to ENABLE.
There is no need to specifically select the LonWorks protocol.
Installing the board does that. The parameters above simply
activate the installed protocol.
501 ADDRESS Not Required
LonWorks does not require the assignment of a device address.
The Neuron ID takes care of this.
502 BAUD Not Required LonWorks Free Topology has a fixed BAUD rate of 78 Kbaud.
803
BUS TIME OUT 1 sec. Used for LON only
804
TIME OUT
FUNCTION
No Function
Used foe LON only
Parameters for Open Loop Control and Monitor through LON (Scenario C)
Parameter Description Setting Comment
100 CONFIG. MODE OPEN LOOP Sets up the drive to follow a speed reference signal.
204 MIN. REFERENCE As required This is generally set for either 0 Hz or the value of parameter
201, MIN. FREQUENCY. The selection depends on how the
speed reference signal is set up.
205 MAX. REFERENCE As required Generally 60 Hz, the same as the setting of parameter 202,
MAX. FREQUENCY.
308 AI [V] 53 FUNCT. REFERENCE
or
NO OPERATION
This determines if analog input 53 is used for the speed
reference signal. If it is, the scaling of this input is controlled
by parameters 309 and 310. If it isn’t, this should be set to
NO OPERATION.
311 AI [V] 54 FUNCT. REFERENCE
or
NO OPERATION
This determines if analog input 54 is used for the speed
reference signal. If it is, the scaling of this input is controlled
by parameters 312 and 313. If it isn’t, this should be set to
NO OPERATION.
314 AI [mA] 60 FUNCT REFERENCE
or
NO OPERATION
This determines if analog input 60 is used for the speed
reference signal. If it is, the scaling of this input is controlled
by parameters 315 and 316. If it isn’t, this should be set to
NO OPERATION.













































